Download
1 / 17

E N D
1. Image Guided Robotic Biopsy Group Members:
Ryan Augustine
Nate Gaeckle
Brian Frederick
Gordy Lawrence
Advisor: Professor Willis Tompkins
Client: Dr. Myron Pozniak
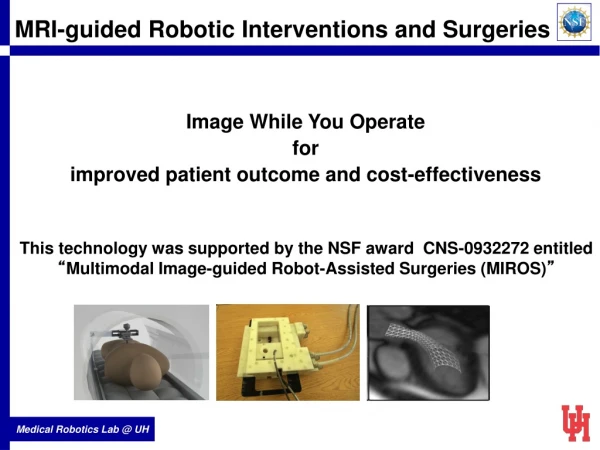
2. Abstract A robotic arm has been developed to eliminate the humans errors of biopsies
The Robotic Arm advances the needle slowly
Causes tumor movement and inaccurate biopsies
Increases risk of internal injury
We designed a pneumatic driver that should quickly insert and remove the needle
Three prototypes have been assembled
Needle retrieval and sampling designs have yet to be built
3. Motivation Problems with current drive mechanism
Slow needle advancement: 2 cm/s
Slower biopsies increases risk of internal damage
Creates tumor movement
Makes use of the robotic arm infeasible
5. Problem Definition Biopsies are used in conjunction with a CT scan
Many dilemmas with manual biopsy needle injection
Inaccurate
Physician exposure to radiation
Sometimes multiple attempts at tumor capture
Robotic Arm created to eliminate these problems
6. Problem Statement
Our goal is to create a needle driver that:
Drives a needle fast to counter tumor movement and patient injury
Retracts the needle with speed and ease with a sample of the tumor
Is compatible with CT scanners
Preserves Imageguide Inc.�s Remote Center of Motion for the Robotic Arm
7. Design Criteria Device must not be any longer than 30 cm
Radiolucent material
Must have redundant safety checks
Needle must be extracted rapidly with tissue sample
Needle must be fired fast enough to utilize inertia of body tissue
Biopsy should be completely automatic
8. Current Design
Needle contained inside piston/cylinder assembly
Needle injected and retracted via pneumatic power
Meets length restrictions
Most parts may be constructed from plastic
9. Internal view of final pneumatic firing system
Needle inside cylinder
Needle able to inject or retract based on direction of air flow
10. Testing with Metallica Tested needle deflection through the soft portion of a pig�s foot and gelatin
Needle velocity estimated at 4 m/s at ~5psi
2000-4000 lbs/in2 generated at needle tip
Needle bent on first trial into pig�s foot
11. Silver Bullet vs. The Turkey Breast Shot through easily with no apparent deflection at various heights
Shot at 30 psi
More pressure was needed for the prototype to be successful
12. Silver Bullet vs. The Pig Qualitative assessment for a proper distance from patient
Enhanced performance as pressure increased
50 psi worked the best
Compromises material selection
Tested on wide range of tissues
No variability in needle behavior
13. Retraction Mechanism Solenoid valve alternates air flow to retract needle
Compressed air
Vacuum line
Retroreflector sensor
senses when needle is at the end of the tube
causes the solenoid valve to switch to vacuum line
14. Needle Designs
15. Future Work Design mechanism within plunger to cause biopsy needle to capture tissue
Implement valve to direct air flow
Design mechanism to sequence firing and retracting
Implement radiolucent material
Interface with ImageGuide robotic arm
Needles of different length
16. References ImageGuide, Inc. Feb. 16, 2004. Image-Guided Robotics for Minimally Invasive Cancer Diagnosis and Therapy. PowerPoint Presentation.
Chesler, N. 2004. Personal Interview
Fronczak, F. 2004. Personal Interview
Pozniak, M. 2004. Personal Interview
Sidney, D. 2004. Personal Interview
Webster, J. 2004. Personal Interview
17. ?