Download
1 / 26
640 likes | 1.87k Views
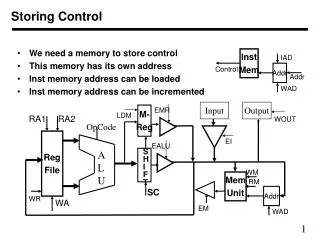
Model Reference Adaptive Control Survey of Control Systems (MEM 800). Presented by Keith Sevcik. Model. y model. Adjustment Mechanism. Controller Parameters. u c. Controller. Plant. u. y plant. Concept.

E N D
Model ReferenceAdaptive ControlSurvey of Control Systems (MEM 800) Presented byKeith Sevcik
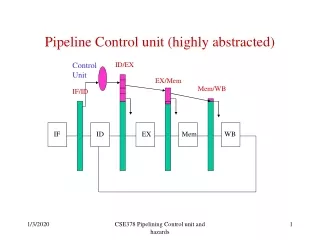
Model ymodel Adjustment Mechanism Controller Parameters uc Controller Plant u yplant Concept • Design controller to drive plant response to mimic ideal response (error = yplant-ymodel => 0) • Designer chooses: reference model, controller structure, and tuning gains for adjustment mechanism
MIT Rule • Tracking error: • Form cost function: • Update rule: • Change in is proportional to negative gradient of sensitivity derivative
MIT Rule • Can chose different cost functions • EX: • From cost function and MIT rule, control law can be formed
Reference Model ymodel Adjustment Mechanism - + θ Π Plant uc Π u yplant MIT Rule • EX: Adaptation of feedforward gain
MIT Rule • For system where is unknown • Goal: Make it look like using plant (note, plant model is scalar multiplied by plant)
MIT Rule • Choose cost function: • Write equation for error: • Calculate sensitivity derivative: • Apply MIT rule:
Reference Model ymodel Adjustment Mechanism - + θ Π Plant uc Π u yplant MIT Rule • Gives block diagram: • considered tuning parameter
MIT Rule • NOTE: MIT rule does not guarantee error convergence or stability • usually kept small • Tuning crucial to adaptation rate and stability.
d2 d1 dc T MRAC of Pendulum • System
Model ymodel Adjustment Mechanism Controller Parameters uc Controller u yplant MRAC of Pendulum • Controller will take form:
MRAC of Pendulum • Following process as before, write equation for error, cost function, and update rule: sensitivity derivative
MRAC of Pendulum • Assuming controller takes the form:
MRAC of Pendulum • If reference model is close to plant, can approximate:
MRAC of Pendulum • From MIT rule, update rules are then:
Reference Model ymodel - + Π + - uc yplant θ1 e Plant Π θ2 Π Π MRAC of Pendulum • Block Diagram
MRAC of Pendulum • Simulation block diagram (NOTE: Modeled to reflect control of DC motor)
MRAC of Pendulum • Simulation with small gamma = UNSTABLE!
MRAC of Pendulum • Solution: Add PD feedback
MRAC of Pendulum • Simulation results with varying gammas
Experimental Results • PD feedback necessary to stabilize system • Deadzone necessary to prevent updating when plant approached model • Often went unstable (attributed to inherent instability in system i.e. little damping) • Much tuning to get acceptable response
Conclusions • Given controller does not perform well enough for practical use • More advanced controllers could be formed from other methods • Modified (normalized) MIT • Lyapunov direct and indirect • Discrete modeling using Euler operator • Modified MRAC methods • Fuzzy-MRAC • Variable Structure MRAC (VS-MRAC)