Download
1 / 9
90 likes | 217 Views
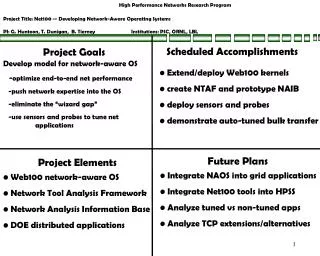
Solar Ray Special Sensor Demo Hawkeye D11S Depth Sounder Robert Love rdlove@ufl.edu University of Florida Department of Mechanical and Aerospace Engineering EEL 5666C – Intelligent Machines Design Lab A.A. Arroyo, E.M. Schwartz, M. Pridgen, T. Vermeer. Solar Ray - Project Goals.

E N D
Solar Ray Special Sensor Demo Hawkeye D11S Depth Sounder Robert Loverdlove@ufl.eduUniversity of FloridaDepartment of Mechanical and Aerospace Engineering EEL 5666C – Intelligent Machines Design Lab A.A. Arroyo, E.M. Schwartz, M. Pridgen, T. Vermeer
Solar Ray - Project Goals • Autonomous Underwater Robot • Swims by Flapping • Avoids Obstacles • Obtains Video, Stores on SD Card • Automatic Recharge with Solar Energy • 2 hour Dive, 10+ ft deep • Quick Access to Electronics • Built with COTS Components Cownose Ray: http://vimeo.com/7697526 http://www.roperresources.com/images/sauv.jpg http://www.drives.co.uk/images/news/Festo%20ray.jpg
Solar Ray Robot Status DVR Weight Tuning PV Board, LCD CdS Cells On/Off Switch Programming Extension Battery Packs (Up to 30 AA’s) Flapping Ctrl Hawkeye D11S Depth Sounders AOA Tuning Bullet Camera (720x480,110min) Pitch/Yaw Ctrl
Solar Ray -Hardware • Microcontroller • Pridgen-Vermeer Board, LCD, 2 Debug LEDs • Power • 1x 12V 30Ah , 1x 6V 15Ah Energizer Battery Pack • 1 Powerfilm R15-30 Solar Charger (300 mA) • Sensors • 2x Bump Sensors: Reset, Pause Program • 1x CdS Cell: Presence of Light • 2x D11S Hawkeye Depth Finder: Obstacle Avoidance • 1x CMUcam3: Record Video • Actuation • Flapping Wings: 2 Hitec HS-7950TG Servos (486 oz-in) • Tail: 2 Traxxas 2075 Waterproof Servos (125 oz-in)
Solar Ray – Initial Fabrication • Main Unit Top View With And Without Solar Panel