Download
1 / 19
190 likes | 423 Views
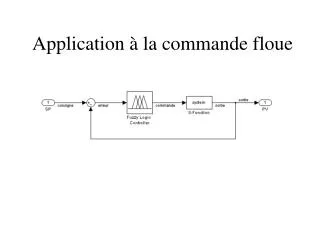
Instrumentation de la commande. Objectifs & spécificité Mise en œuvre de technique d’obtention de code déterministe. Mise en œuvre de loi de commande sur cible RT embarquée. Mise en œuvre sur architecture matérielle spécifique: Les cibles cRIO –NI Programmation graphique avancée.

E N D
Instrumentation de la commande Objectifs & spécificité Mise en œuvre de technique d’obtention de code déterministe. Mise en œuvre de loi de commande sur cible RT embarquée. Mise en œuvre sur architecture matérielle spécifique: Les cibles cRIO –NI Programmation graphique avancée • Volume horaire et évaluation du module: • 4h de cours. • 10h de TD : Ciblage de cRIO + Exercices de programmation graphique avancée • 28h de TP : Programme de pilotage des maquettes sur documents de spécifications. • Travail évalué en autonomie assistée.
Partie I: Application RT embarquée?/ Le temps-réel. Application temps-réel? Une application temps –réel est une application ayant la capacité de répondre et d’effectuer ses traitements spécifiques dans un intervalle de temps donné, borné, garanti Une application temps-réel doit finir « à temps », « tout le temps ». • Exemple: • la commande en boucle fermée. • Traitement d’images en lignes. • Contrôle commande de surveillances • Un traitement effectué sous un OS classique (MAC OS, Windows, Linux, iOS…) ne permet pas de garantir un borne supérieure systématique pour sa durée. • Un traitement effectué sous un OS RT (Vxorks, ETS…) n’a pas forcément les caractéristiques du traitement RT. • Il faut respecter certaines règles de conceptions… 3
Partie I: Application RT embarquée?/ Le temps-réel. Déterminisme temporel • Le temps de cycle. • - La plus part des opérations requérants un OS RT sont cycliques. • - Le temps de cycle est le temps entre les départs de 2 traitements consécutifs. • Le jitter • - Le jitter est la variation du temps de cycle à partir du temps de cycle de référence. • Origine du jitter: • Jitter à l’éxécution. • Jitter matériel • Jitter d’ordonnancement … • Le déterminisme. • - Le déterminisme est un caractéristique des systèmes dont le jitter est borné. Le temps réel s’identifie à la robustesse du code et au déterminisme temporel. 4
Partie I: Application RT embarquée?/ Embarquée. Système et application embarquée? - Système électronique piloté par logiciel et intégré au système qu’il contrôle. Exemples: Automobile, sonde, satellite, Téléphone, imprimante, photocopieur, Distributeur de billet DAB, API, capteurs TEDS, Machine à laver etc, etc…… • Système et applications soumises à des restrictions (souvent…) • RAM disponible • Espace physique • Consommation énergétique.. • Application sans IHM classique (souvent…) • Pas de clavier, souris, écran: interaction non déterministe. • Interactions continues et/ou non bloquantes • Application intégrant un protocole de communication (souvent…) • Historisation, data logging • Recette, et modification de paramètres. 5
Partie I: Application RT embarquée?/ OS OS RT vs OS classique L’OS gère l’accès des tâches au temps processeur. OS classique OS RT • Gère les interruptions : • port USB, souris, clavier, périphériques, Ethernet etc.. • Ne gère pas les priorités. • Gère les priorités entre thread. • Garantie que les tâches de plus grande priorité s’exécute en 1eer. • Permet une maîtrise de l’accès aux ressources matérielles. Pas de déterminisme à l’exécution Déterminisme possible à l’exécution - Analyse de données hors ligne. - Représentation des données - Acquisition de données • Commande en boucle fermée • Tâche de contrôle et sécurité de fonctionnement • Application en exécution permanente • Application autonome 6
Partie II: Présentation de la cible RT mise en oeuvre La cible d’exécution RT utilisée. - Le compact RIO (cRIO): Acronyme pour Compact Reconfigurable Input-Output - Architecture matérielle et outils logiciel tout à fait spécifique (National Instruments) • Contrôleur d’automatismes programmable ( PAC) • Il ne s’agit pas d’un automate qui répond aux spécifications de la CEI 61131. 7
Partie II: Le compact RIO Constitution Un Contrôleur RT Chassis FPGA Modules d’E/S 8
Partie II: Le compact RIO Qu’est ce qu’un cRIO? • Cible d’exécution de code déterministe dans un environnement embarqué et/ou sévère. • Cible: Cible d’exécution de code compilé. • Déterministe: OS RT embarqué (VxWorks) • Embarqué: Alimentation double 9-35Vcc/20Wmax • Environnement Sévère: 50G & -50°C->+70° • Système modulaire et autonome d’acquisition et de génération rapide de signaux digitaux et analogiques • Modulaire: Module métier généraux ou assez spécifique (Cf énumération ultérieure) • Rapide: Horloge hardware FPGA 40MHz (25ns...) • Digitaux: TTL et analogique (courant, tension sur différentes gamme d’entrée) • Système communiquant sur port Ethernet – série + Port USB. • Ethernet pour programmation et Communication (serveur Web et ftp). • Série RS 232 pour adresser des périphériques + Mode débogage • USB pour stockage des flux de données. • Possibilités d’incorporer d’autres protocoles (CAN, modbus…) 9
Partie II: Le compact RIO Spécifications du cRIO mis en œuvre. 10
Partie II: Le compact RIO Les modules d’E/S 11
Partie II: Le compact RIO Structure d’une application sur cRIO Un application conçue pour une cible cRIO consiste en 3 programmes fondamentaux : • un programme hôte (host) pour interagir avec un utilisateur. • un programme temps réel (target) pour effectuer des traitements et des communications • un programme FPGA pour exécuter des fonctions d’E/S et contrôles très rapides. Le programme hôte est optionnel via serveur Web ou sans objet. Le programme FPGA peut être omis via l’utilisation du Scan Mode 12
Partie II: Le compact RIO A propos des FPGA et LabVIEW FPGA FPGA: Circuit de blocs logiques reconfigurables Programmation FPGA (V erilog, VHDL) Intégration de code au niveau hardware LV FPGA: Compilation de code LV en bitfile Le FPGA est au ♡ de l’architecture cRIO 13
Partie II: Le compact RIO Traitement FPGA vs Traitement logiciel RT Utilisation FPGA: Pas d’OS: Vrai parallélisme! Horloge HW 40MHz! Boucles multi-cadencées réelles • Code FPGA: • Niveau de code « reflexe » imbattable en terme de déterminisme et rapidité par du ‘code logiciel ’. • Possibilités restreintes (Quid USB, Com Ethernet, Calcul complexe, Format numérique spécif., Accès disque etc…?) • Le nombre de portes est une facteur limitant. Le Scan mode permet de s’affranchir du programme LV FPGA
Partie II: Le compact RIO Le ScanMode 15
Partie II: Le compact RIO Le ScanMode 16
Partie II: Le compact RIO Le ScanMode 17
Partie II: Le compact RIO Le ScanMode 18
Partie II: Le compact RIO Le ScanMode 19