Download
1 / 4
40 likes | 169 Views
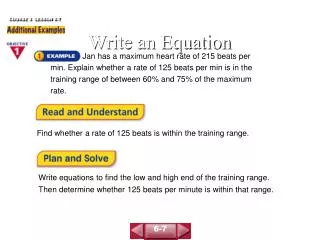
4. 3. Object write down a discrte equation in the form. 5. 1. 2. %Simple Point code clear all %store coefficents a=zeros(5,1); Vol_i=0; %CV area % Global coordinates x(1)=0; y(1)=0; x(2)=1; y(2)=0; x(3)=1; y(3)=1; x(4)=0; y(4)=1; x(5)=0.5; y(5)=0.5; %known values

E N D
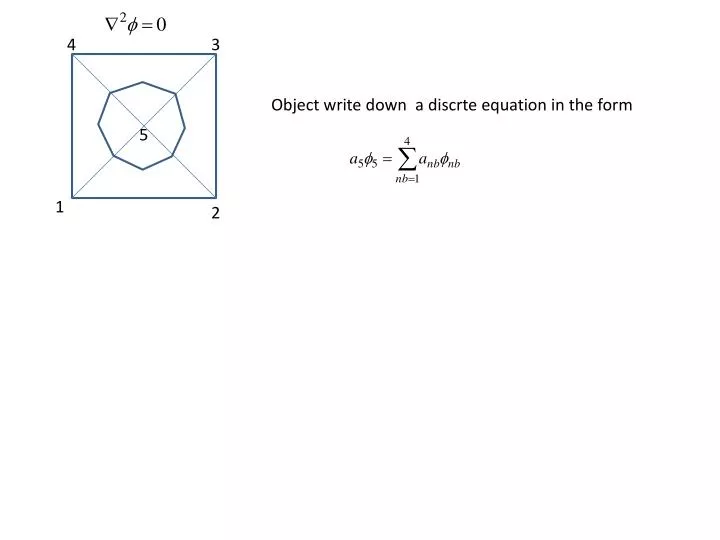
4 3 Object write down a discrte equation in the form 5 1 2
%Simple Point code clear all %store coefficents a=zeros(5,1); Vol_i=0; %CV area % Global coordinates x(1)=0; y(1)=0; x(2)=1; y(2)=0; x(3)=1; y(3)=1; x(4)=0; y(4)=1; x(5)=0.5; y(5)=0.5; %known values for tri=1:4 %loop on triangles %Local to global nodes L1=5; L2=tri; if tri<4 L3=tri+1; else L3=1; end xL(1)=x(L1); yL(1)=y(L1); xL(2)=x(L2); yL(2)=y(L2); xL(3)=x(L3); yL(3)=y(L3); %2Xelemnt area v=xL(2)*yL(3)-xL(3)*yL(2)... -xL(1)*yL(3)+xL(1)*yL(2)+yL(1)*xL(3)-yL(1)*xL(2); Vol_i=Vol_i+v/6; %contribution to CV volume Nx(1)=(yL(2)-yL(3))/v; %Nx=shape function Nx(2)=(yL(3)-yL(1))/v; Nx(3)=(yL(1)-yL(2))/v; Ny(1)=-(xL(2)-xL(3))/v; %Ny=shape function Ny(2)=-(xL(3)-xL(1))/v; Ny(3)=-(xL(1)-xL(2))/v; %Face 1 %directed lengths delx= [(xL(1)+xL(2)+xL(3))/3]-[(xL(1)+xL(2))/2]; dely= [(yL(1)+yL(2)+yL(3))/3]-[(yL(1)+yL(2))/2]; %point coeficient a(L1) = a(L1) - Nx(1) * dely + Ny(1) * delx; %note - sign %Neigbouring coeff a(L2)=a(L2)+ Nx(2) * dely - Ny(2) * delx; a(L3)=a(L3)+ Nx(3) * dely - Ny(3) * delx; %Face 2 delx= [(xL(1)+xL(3))/2]-[(xL(1)+xL(2)+xL(3))/3]; dely= [(yL(1)+yL(3))/2]-[(yL(1)+yL(2)+yL(3))/3]; %point coeficient a(L1) = a(L1) - Nx(1) * dely + Ny(1) * delx; %note - sign %Neigbouring coeff a(L2)=a(L2)+ Nx(2) * dely - Ny(2) * delx; a(L3)=a(L3)+ Nx(3) * dely - Ny(3) * delx; end
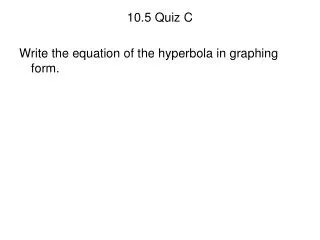
Assembly using MATLAB unstructured data struture p= points 3 8 2 8 5 5 9 10 4 7 6 10 4 9 12 7 6 1 11 11 3 1 2 t= triangles Nodes N= size(p,2) Number of columns in p Elements Ntri=size(t,2) Number of columns in t tri=t’ transpose of t
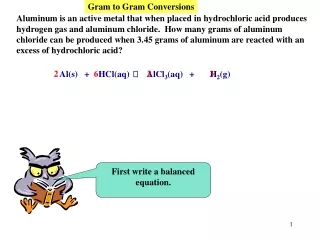
In element 1<=1 itri <= Ntri xL(1) = p(1,k1); %x-values of ele. vert. xL(2) = p(1,k2); xL(3) = p(1,k3); yL(1) = p(2,k1); %y-values of ele. vert. yL(2) = p(2,k2); yL(3) = p(2,k3); k1=t(3,itri) 3 Nx(1)= (yL(2)-yL(3))/(2*v); %Nx=shape function Nx(2)= (yL(3)-yL(1))/(2*v); Nx(3)= (yL(1)-yL(2))/(2*v); Ny(1)=-(xL(2)-xL(3))/(2*v); %Ny=shape function Ny(2)=-(xL(3)-xL(1))/(2*v); Ny(3)=-(xL(1)-xL(2))/(2*v); 2 1 k1=t(2,itri) k1=t(1,itri) element area Coefficient for Flow IN across face %Face 1 separates node K1 from node K2 delx(1)= (xL(1)+xL(2)+xL(3))/3-(xL(1)+xL(2))/2; dely(1)= (yL(1)+yL(2)+yL(3))/3-(yL(1)+yL(2))/2; %Face 2 separates node K2 from node K3 delx(2)= (xL(1)+xL(2)+xL(3))/3-(xL(2)+xL(3))/2; dely(2)= (yL(1)+yL(2)+yL(3))/3-(yL(2)+yL(3))/2; %Face 3 separates node K3 from node K1 delx(3)= (xL(1)+xL(2)+xL(3))/3-(xL(1)+xL(3))/2; dely(3)= (yL(1)+yL(2)+yL(3))/3-(yL(1)+yL(3))/2; %FL(i,j) is coef. asso. with kj for flow across face i FL(1,:)=Nx(:)*dely(1)-Ny(:)*delx(1); FL(2,:)=Nx(:)*dely(2)-Ny(:)*delx(2); FL(3,:)=Nx(:)*dely(3)-Ny(:)*delx(3); Contributions To ap(k1)=ap(k1)-FL(1,1)+FL(3,1); ap(k2)=ap(k2)-FL(2,2)+FL(1,2); ap(k3)=ap(k3)-FL(3,3)+FL(2,3); a(k1,k2)=a(k1,k2)+FL(1,2)-FL(3,2); a(k1,k3)=a(k1,k3)+FL(1,3)-FL(3,3); a(k2,k1)=a(k2,k1)+FL(2,1)-FL(1,1); a(k2,k3)=a(k2,k3)+FL(2,3)-FL(1,3); a(k3,k1)=a(k3,k1)+FL(3,1)-FL(2,1); a(k3,k2)=a(k3,k2)+FL(3,2)-FL(2,2);