Download
1 / 22
230 likes | 590 Views
Multivariable Control Systems ECSE 6460. Fall 2009 Lecture 1: 1 September 2009. Information. Instructor: Agung Julius ( agung@ecse ) Office hours: JEC 6044 Mon,Wed 2 – 3pm Textbook : S. Skogestad & I. Postlethwaite , Multivariable Feedback Control 2 n d ed , Wiley.

E N D
Multivariable Control SystemsECSE 6460 Fall 2009 Lecture 1: 1 September 2009
Information • Instructor: Agung Julius (agung@ecse) • Office hours: JEC 6044 Mon,Wed2 – 3pm • Textbook: S. Skogestad & I. Postlethwaite, Multivariable Feedback Control 2nded, Wiley. • Additional reading: J. Doyle, B. Francis, A. Tannenbaum, Feedback Control Theory, Macmillan. Downloadable from Bruce Francis’ website (google) Online contents: • www.ecse.rpi.edu/~agung(Notes, HW sets) • RPI LMS (grades)
Prerequisite(s) The course is for graduate or advanced undergraduate students with working knowledge in differential calculus, linear algebra, complex numbers, and classical linear systems/control theory. Attendance background?
Grading • Homeworks (5 sets) = 40% • 2 x Exams = 30% + 30% • Homework sets are due one week after handout. Late submissions will get point deduction (no later than 1 week). • Exams are take home tests. Will include control design type of task.
Other issues • Exchanging ideas is allowed for solving the homework sets, but not copying. • No collaboration is allowed for exams! • You will need MATLAB. An installer with campus license is available from http://helpdesk.rpi.edu software • Beware: Need to be connected to RPI network, use VPN client from outside. http://helpdesk.rpi.edu networking
Course outline • Introduction • Classical Feedback Control • Loop Shaping • MIMO Control • Performance Limitations • Disturbance and Robustness • Controller Design • Model Reduction
Linear Time Invariant Systems S Time invariance: Linearity:
Linear Differential Systems With zero initial conditions. Why? Two ways to describe the systems: Time domain Laplace transform inverse transform Frequency domain
Control Problem ? M
Feedforward vs feedback • Feedforward: use an inverse model of the plant to compute the control input. • Generally not a good idea! Why?
Feedforward vs feedback • Feedback: use output measurement to compute control input. • How to design a good controller? • What is a good controller? Controller Plant
Performance limitation • Performance criteria: stability, speed of response, overshoot, disturbance rejection, etc. • Can we always attain any desired performance using feedback control? • Short answer: NO. Why?
Disturbance and Robustness disturbance Controller Plant disturbance Design a controller that works, despite the presence of disturbances.
Disturbance and robustness • How to best model the disturbance M
Disturbance and robustness • How to best model the disturbance M Square wheels!!!
Robustness issue • Suppose that we know how to design a good controller ifwe know the plant (and disturbance) model. • It is still a very big IF ! • In practice, we don’t know the model precisely. There’s always uncertainty, modeling error, parameter variation, etc. • Challenge: design a good controller, even though we don’t know the plant model. • Is it possible? How?
Model reduction • Reduce the complexity of the mathematical model, by throwing out the inessentials. High order system
Fictitious application NOT a class project!! Low order system
Model reduction • Reduce the complexity of the mathematical model, by throwing out the inessentials. • We need to know how much detail is lost.
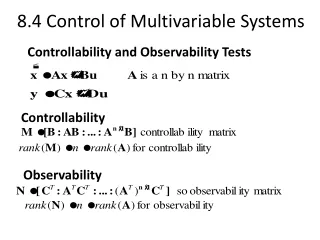
Multivariable? • Input and output variables are multidimensional, i.e. vectors instead of scalars. • Consequences: • Different algebraic rules • Quantities have directions, in addition to magnitudes. • Controller topology can be important. (which output influences which input?) • How do we generalize SISO results to MIMO?