Download
1 / 22
240 likes | 305 Views
This course covers classical feedback control, loop shaping, MIMO control, disturbance handling, robustness, controller design, and model reduction for linear time-invariant systems. Topics include controller-plant performance criteria, disturbance rejection, and robustness issues in control design. Students will explore feedforward vs. feedback control strategies and study model reduction techniques for simplifying complex mathematical models. The course emphasizes the challenges of designing effective controllers in the presence of uncertainties and modeling errors. MATLAB knowledge is required for exercises and exams.

E N D
Multivariable Control SystemsECSE 6460 Fall 2009 Lecture 1: 1 September 2009
Information • Instructor: Agung Julius (agung@ecse) • Office hours: JEC 6044 Mon,Wed2 – 3pm • Textbook: S. Skogestad & I. Postlethwaite, Multivariable Feedback Control 2nded, Wiley. • Additional reading: J. Doyle, B. Francis, A. Tannenbaum, Feedback Control Theory, Macmillan. Downloadable from Bruce Francis’ website (google) Online contents: • www.ecse.rpi.edu/~agung(Notes, HW sets) • RPI LMS (grades)
Prerequisite(s) The course is for graduate or advanced undergraduate students with working knowledge in differential calculus, linear algebra, complex numbers, and classical linear systems/control theory. Attendance background?
Grading • Homeworks (5 sets) = 40% • 2 x Exams = 30% + 30% • Homework sets are due one week after handout. Late submissions will get point deduction (no later than 1 week). • Exams are take home tests. Will include control design type of task.
Other issues • Exchanging ideas is allowed for solving the homework sets, but not copying. • No collaboration is allowed for exams! • You will need MATLAB. An installer with campus license is available from http://helpdesk.rpi.edu software • Beware: Need to be connected to RPI network, use VPN client from outside. http://helpdesk.rpi.edu networking
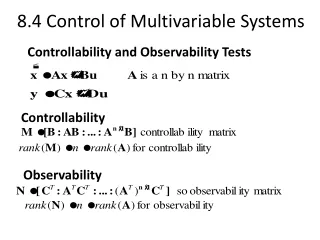
Course outline • Introduction • Classical Feedback Control • Loop Shaping • MIMO Control • Performance Limitations • Disturbance and Robustness • Controller Design • Model Reduction
Linear Time Invariant Systems S Time invariance: Linearity:
Linear Differential Systems With zero initial conditions. Why? Two ways to describe the systems: Time domain Laplace transform inverse transform Frequency domain
Control Problem ? M
Feedforward vs feedback • Feedforward: use an inverse model of the plant to compute the control input. • Generally not a good idea! Why?
Feedforward vs feedback • Feedback: use output measurement to compute control input. • How to design a good controller? • What is a good controller? Controller Plant
Performance limitation • Performance criteria: stability, speed of response, overshoot, disturbance rejection, etc. • Can we always attain any desired performance using feedback control? • Short answer: NO. Why?
Disturbance and Robustness disturbance Controller Plant disturbance Design a controller that works, despite the presence of disturbances.
Disturbance and robustness • How to best model the disturbance M
Disturbance and robustness • How to best model the disturbance M Square wheels!!!
Robustness issue • Suppose that we know how to design a good controller ifwe know the plant (and disturbance) model. • It is still a very big IF ! • In practice, we don’t know the model precisely. There’s always uncertainty, modeling error, parameter variation, etc. • Challenge: design a good controller, even though we don’t know the plant model. • Is it possible? How?
Model reduction • Reduce the complexity of the mathematical model, by throwing out the inessentials. High order system
Fictitious application NOT a class project!! Low order system
Model reduction • Reduce the complexity of the mathematical model, by throwing out the inessentials. • We need to know how much detail is lost.
Multivariable? • Input and output variables are multidimensional, i.e. vectors instead of scalars. • Consequences: • Different algebraic rules • Quantities have directions, in addition to magnitudes. • Controller topology can be important. (which output influences which input?) • How do we generalize SISO results to MIMO?