Download
1 / 14
140 likes | 258 Views
Using Photospheric Flows Estimated from Vector Magnetogram Sequences to Drive MHD Simulations. B.T. Welsch, G.H. Fisher, W.P. Abbett, D.J. Bercik, Space Sciences Laboratory, UC - Berkeley. Abstract.

E N D
Using Photospheric Flows Estimated from Vector Magnetogram Sequences to Drive MHD Simulations B.T. Welsch, G.H. Fisher, W.P. Abbett, D.J. Bercik, Space Sciences Laboratory, UC - Berkeley
Abstract Dynamic models of magnetic field above the solar photosphere show promise as space weather forecasting tools. Such models should be driven by velocities or electric fields derived from sequences of photospheric vector magnetograms, the only routine measurements of the solar magnetic field currently available. Previous efforts have focussed on deriving flows --- or, equivalently, ideal electric fields --- consistent with evolution of the normal photospheric field, which could be used in "component driving" of an MHD model, i.e., enforcing consistent evolution of the observed and modeled normal magnetic fields. Here, we present an extension of the flow-based, component-driving approach: we demonstrate how to derive flows (or, equivalently, ideal electric fields) consistent with the observed evolution of both the normal magnetic field and normal electric current, to determine velocities that can be used for "ideal vector driving" (IVD), i.e., enforcing consistency between the evolution of all three components of the observed and model photospheric magnetic vectors. While IVD does not require tracking magnetograms to derive flows or ideal electric fields, it can incorporate tracking results. Driving an MHD model via IVD requires specification of both the velocity vector and its vertical derivative at the model's bottom boundary.
Photospheric E, v fields affect magnetic evolution in both the photosphere and corona. • We assume that E = -(v x B)/c, so the fluxes of magnetic energy & helicityacross the photosphere are: dU/dt = ∫ dA [(Bh∙Bh)vz - (v∙Bh)Bz] /4π (1) dH/dt = 2 ∫ dA [(Bh∙AP)vz - (v∙AP)Bz] (2) • B in the corona is coupled to B at the surface, so the surface v provides an essential boundary condition for data-driven MHD simulations of the coronal B field. • Studying v could improve evolutionary models of photospheric B fields, e.g., flux transport models.
We present a way to find v consistent with vector tB, assuming tB = x(v x B). • Previous methods derived flows consistent with componentevolution, tBz. • Our “ideal vector driving” (IVD) method is consistent with vectorevolution, tB. • IVD only determines the component of v perp-endicular to B; all notation assumes (v · B) = 0. • Flows parallel to B are not constrained by IVD.
IVD sets both v and its vertical derivative, zv. • Following Démoulin & Berger (2003), we define the 2-D (horizontal) flux transport velocity to be u Bz = vh Bz – Bh vz = (Eh x z). (3) • We also define the vertical derivative of the flux transport velocity, w≡ z(u Bz). (4) ^
The ideal induction equation can be rewritten in terms of the flux transport velocity: ^ tBh =w - (h x Ezz), (5) tBz = - h·(u Bz). (6) To proceed, we define potentials for the flux transport velocity and its vertical derivative: u Bz ≡ -h - (h x z) = (Eh x z), (7) w≡ -h - (h x z). (8) ^ ^ ^
The divergence & curl of equations (7) & (8) can be related to magnetic evolution and flows: h2 = tBz (9) h2 = (h x u Bz)·z = -(h·Eh) (10) h2= - t (h·Bh) (11) h2 ( +Ez) = t (h x Bh)·z = (4π/c) t Jz (12) Equations (9) & (11) can be derived directly from vector magnetogram sequences! Equations (10) & (12) require more work… ^ ^
Finding requires estimating the source term in equation (10), (h x u Bz) ·z. ^ Local methods to find include tracking, e.g.: • Local Correlation Tracking (LCT; November & Simon 1988; Welsch et al. 2004; Fisher & Welsch 2008) • the Differential Affine Velocity Estimator (DAVE, and DAVE4VM; Schuck 2006 & Schuck, submitted to ApJ) Global methods find via integral constraints, e.g., the Minimum Energy Fit (MEF Longcope 2004) Welsch et al. (2007) tested some of these methods using “data” from MHD simulations; MEF and DAVE performed best. DAVE4VM was not tested.
and completely determine Eh, and, via ideality, Ez. Equation (12) then determines . ^ • Recall that Eh = -h - (hx z). • Ideal evolution requires E · B = 0, so specifying Eh implies that Ez = -Eh· Bh / Bz • Then equation (12) can be solved, h2 = -h2Ez + (4π/c) t Jz (13)
Schematic Solution Recipe: Given a sequence of magnetograms, {B(x,y,t_i}. • Use equations (9) and (11) for and , resp. • Use DAVE4VM or MEF to determine in equation (10). • Since and specify Eh, use ideality to specify Ez= - Eh·Bh /Bz • Solve equation (12) for . • Equations (3), (4), and (v · B) = 0 then determine both v and zv. A dynamic model of the magnetic evolution above z=0 can then be driven by imposing v and zv.
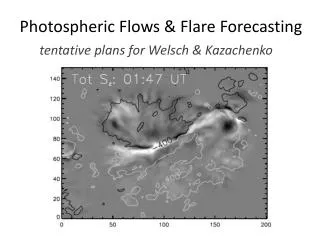
IVD has been tested with “synthetic” magnetograms from ANMHD simulations. Data are those used in Welsch et al. (2007) Images show Bz (grayscale), vz (contours), Bh and vh (blue & white vectors). Plot verifies that evolution is ideal.
The inferred ideal electric fields accurately reproduced the simulation’s magnetic evolution. “Scatter” plots compare ANMHD’s & IVD’s tBz(left) and tJz (right).
Even assuming = 0, IVD’s estimated v & E are significantly correlated with ANMHD’s. The results of Welsch et al. (2007) suggest that using methods like MEF to determine should reduce scatter.