Download
1 / 23
230 likes | 431 Views
Team Rubber Ducky Alex Chi Joshua Rubin Alexander Starick Ryan Ramos. Tracking Rover. Project Overview. Design a robotic rover IR sensing and tracking system Implement a grabbing device Fully autonomous robot powered by two DC motors Implement system to obtain the IR emitting object.

E N D
Team Rubber Ducky Alex Chi Joshua Rubin Alexander Starick Ryan Ramos Tracking Rover
Project Overview Design a robotic rover IR sensing and tracking system Implement a grabbing device Fully autonomous robot powered by two DC motors Implement system to obtain the IR emitting object
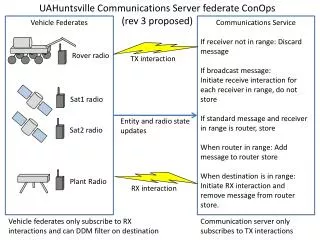
SBC • TS5600 -Technologic Systems • 133Mhz AMD Elan 520 (586) Processor • Compact flash booting • On Board DIO • 2 serial ports • WiFi communication via pcmcia card
68HC11K4 Microprocessor • 8 channel, 8 bit A/D converter • Pulse Width Modulation • Four 8 bit • Two 16 bit • Allows for Serial communication
Motor Control Motor speed is directly proportional to applied voltage Will supply pulse to control speed Needs a minimum of 2V to be activated
Grabbing Device Considering several possibilities depending on progress made A) Linear Actuator (most likely) B) Robotic Arm (if time permits)
Power Supply Buck Converter- voltage supplied by a battery (12.8-11.5V), controlled by the PWM chip to adjust the duty cycle Need a constant +5V output for SBC and sensors
Comparator Circuit Add to notify the user when the battery is 25% charged to avoid completely discharging the battery Give signal to SBC to shut down to prevent brownouts When the voltage drops below 11.5V, LEDs will turn on- will be necessary to shut down the system and recharge the battery
IR Sensors Use IR Receivers and phototransistors IR Receiver- sends a digital signal (+5V if signal detected, 0V if no signal) directly to SBC Phototransistors- Sends a analog signal to HC11 for a/d conversion (strength of signal will depend of closeness of object). Located only on the front side Testing of sensitivity in progress…
Parts List Microprocessor 68M711K4HC11 XC9572 Three 74HC245 AT29C256 ROM AS7256 RAM Power Distribution Battery UC3525, TC427, passive components IR sensors 12 TSOP1156 IR receiver 4 TEKT5400S Phototransistor 15 TSAL7600 IR LEDs 2 AA batteries SBC WIFI card Flash card Flash reader
Budget - Robot Assembly - $350 SBC- $300 Flash Card Reader - $70 Battery + Charger- $200 Passive Components/ Perf Boards/Other - $75 HC11, HC245, CPLD, RAM, ROM - Free IR Receivers, Phototransistors- Free Other $50 ____________________________________________________ Total $975
Milestones 1 Create a Software Testbench Write manual robot control software Complete Testing of full HC11 schematic Complete CPLD programming Develop IR system
Milestone 2 Create communication S/W for HC11 Interface HC11 with SBC and motors Add bumper sensors
Division of Labor Joshua Rubin SBC S/W, HC11 software Alexander Chi HC11 H/W and S/W, SBC Alexander Starick Sensors, CPLD, Power Supply, SBC, grabbing device Ryan Ramos Sensors, grabbing device, power supply, SBC
Completed Tasks HC11 awaits simple testing with ROM Power supply is complete Prototype Puck completed Loading of Linux on SCB completed Robotic platform completed