Download
1 / 22
230 likes | 546 Views
Chapter 10 Synchronisation. Lecture 21: Introduction

E N D
1. EEE4026F Digital Communication Engineering with
Mqhele E. Dlodlo and Emmanuel O. Bejide
backed by
Bernard Sklar and Kamilo Feher
3. Synchronization Defined Phase synchronization.
Symbol Synchronization.
Frame Synchronization.
Frequency Synchronization.
Network Synchronization.
4. Tradeoff There are added cost to receiver design due to the implementation of acquisition and tracking circuits.
Time required for synchronization to be achieved.
Energy expended, for instance on pilot signals, for the purpose of synchronization.
Complexity due to error control.
Frame, block, message synchronization.
Complexity due to spread spectrum technique.
PN sequence synchronization.
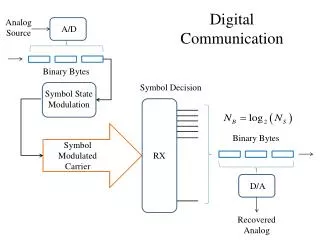
5. Receiver Synchronization. All digital communication receivers require some degree of synchronization to the incoming signal.
6. Frequency and Phase Synchronization. A Phase-Locked-Loop (PLL) is at the heart of nearly all synchronization circuits.
7. Frequency and Phase Synchronization. PLL are servo-control loops, whose controlled parameter is the phase of a locally generated replica of the incoming carrier signal.
Components of a PLL:
A phase detector
A loop filter
A voltage-controlled oscillator (VCO).
8. Frequency and Phase Synchronization. A phase detector determines the difference in phase between the incoming signal and the reference signal.
The loop filter controls the response of the PLL to the error signal.
The VCO is an oscillator whose output frequency is a linear function of its voltage over some range of input and output.
+ve signal ?increase frequency beyond the uncontrolled value.
-ve signal ? reduce frequency below the uncontrolled value.
9. Frequency and Phase Synchronization. For a normalized input signal of the form:
Consider a normalized VCO output of the form:
10. Frequency and Phase Synchronization. Output error signal at the phase detector output:
If the filter output is low-pass, we will have
11. Frequency and Phase Synchronization. The low pass filter produces an output that is solely the function of difference in phase between the two signals.
The VCO output will be a linear function of y(t).
Deviation in frequency is given as
12. Frequency and Phase Synchronization. The Fourier transform of the difference equation
leads to
Reorganizing, we have
13. Frequency and Phase Synchronization. The order of the PLL is the order of the highest term in jwin the denominator of H(w).
14. Steady state tracking Characteristic of the PLL. The expression for the Fourier transform of the phase error can be given as:
The steady-state error is the residual error after all transients have died away.
15. Performance in noise The input might be noisy, as is the case in many communication systems.
n(t) can be expanded into quadrature components.
16. Performance in noise The output of the phase detector can be written as
The loop filter eliminates the high-frequency components. We are then left with
Let us denote the variance of n/(t) by sn.
It can be shown that the variance of the output phase is:
For the special case of white noise
This is related to the
17. Acqusition. Acquisition is the process of getting the PLL to lock with the incoming signal.
Aided acquisition
With the aid of external circuits.
Self-acqusition
Without the aid of extrnal signals
18. Symbol synchronization. Symbol synchronization is needed in order to achieve optimum demodulation.
Non-Data Aided (NDA).
Data Aided (DA).
20. Closed-loop symbol synchronization.
21. Closed-loop symbol synchronization.
22. Frame Synchronization