Download
1 / 16
180 likes | 340 Views
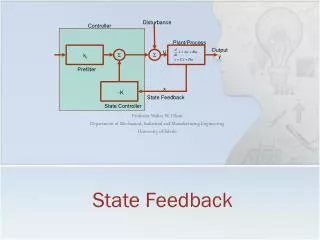
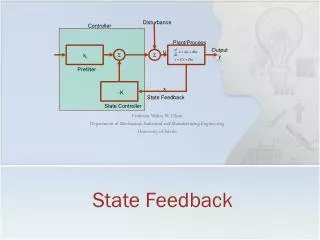
State Feedback. State Feedback. State Feedback. Closed loop matrices. R=0 the system is called regulator. State Feedback. The CL state matrix is a function of K. => Faster/stable system. By appropriate changing K we can change eig( A CL ). This method is called pole placement.

E N D
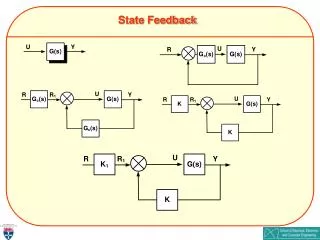
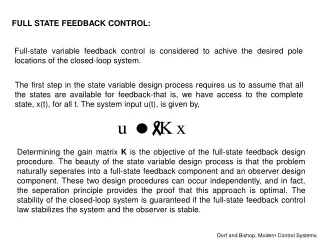
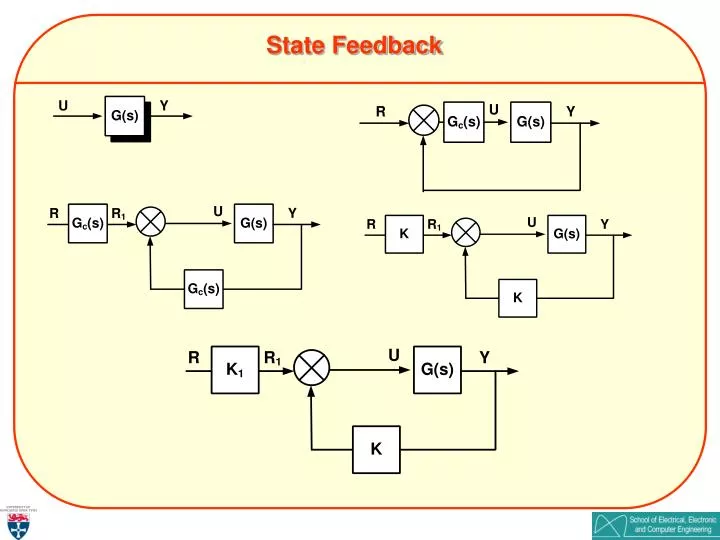
State Feedback Closed loop matrices R=0 the system is called regulator.
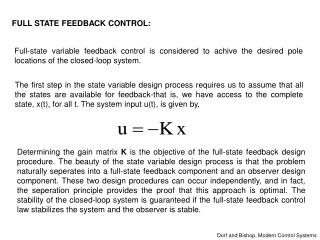
State Feedback The CL state matrix is a function of K => Faster/stable system By appropriate changing K we can change eig(ACL) This method is called pole placement. WE MUST CHECK IF THE SYSTEM IS CONTROLLABLE
State Feedback Eigenvalues of CL system: 3-k CL eigenvalues at -10 k=13
State Feedback If the system is unstable create a controller that will stabilise the system. >> eig(A) >> rank(ctrb(A,B)) ans = -0.3723 5.3723 ans = 2
State Feedback -10 and -11 Matlab If the system is n x n then you need to solve an n x n system of equations! K=place(A,B, [-10 -11]) P=[-10 -20 -30]; C=[0 0 1], D=0. Matlab
State Feedback - LQR Matlab: State feedback Response of the system Reference signal Study the signal u=-Kx Place the poles at [-100 -110] Response of the system Study the signal u=-Kx K =[26 72]T P=[-10 -11]
State Feedback - LQR Compromise between speed and energy that we use. Similar problem/dilemma if we had an input. Solution: Linear Quadratic Regulator (optimum controller) Q and R are positive definite matrices for all nonzero X Square symmetric matrices, positive eigenvalues Q: Importance of the error, R: Importance of the energy that we use (assume that is stable)
State Feedback - LQR (assume that is stable) P is positive definite X=1 Reduced Riccati Equation
State Feedback - LQR Steps to design an LQR controller: • To find the optimum P solve: 2.Find the optimum gain [K, P, E]=lqr(sys, Q, R) E are the eigenvalues of A-BK Find K, The eigenvalues of A-BK The response of the system For R=1 and Q=eye(2) and Q=2*eye(2) (X(0)=[1 1]). Matlab CAD Exercise
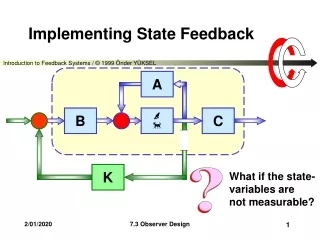
Estimating techniques Magic trick
Estimating techniques Example: A=[1 2;3 4]; B=[1 0]'; C=[1 0]; D=0;
Estimating techniques The error between the estimated and real state is A is unstable Homogeneous ODE A is slow A=[1 2;3 4]; B=[1 0]'; C=[1 0]; D=0; U=1,
Estimating techniques G=place(A’, C’, P) But the system must be observable Where to place these eigenvalues??? A=[1 2;3 4]; B=[1 0]'; C=[1 0]; D=0; U=1,