Download

1 / 13
130 likes | 311 Views
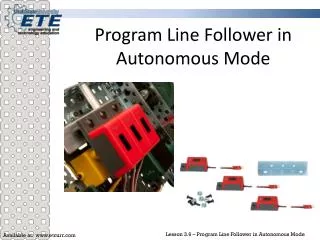
Proyecto Final Line Follower. Microprocesadores Otoño 2008. Fases. El proyecto estara dividido en cuatro fases Fase 1: Z80 y Memorias Lunes 10 de Noviembre Deberan tener el z80 conectado a la EPROM, RAM y el decodificador.

E N D
Proyecto FinalLine Follower Microprocesadores Otoño 2008
Fases • El proyecto estara dividido en cuatro fases • Fase 1: Z80 y Memorias • Lunes 10 de Noviembre • Deberan tener el z80 conectado a la EPROM, RAM y el decodificador. • Tener rutina de diagnostico lista y corriendo adecuadamente en el sistema • Material: • Z80 • Cristal Oscilador • EPROM 27C256 • RAM 6116 • Decoder 74LS138
Motor a Pasos • Fase 2 • Viernes 14 de Noviembre • El sistema tendrá un puerto de salida al cual se le conectaran dos motores a paso • El programa solo deberá incluir el control de ambos motores. • Material necesario • Decoder 74LS138 o Compuerta NAND de 8 Entradas DM74LS30 e inversor 74VHC04 • Latch • Transistores darlington ULN2803A o H-Bridge Motor Driver L293DNEE4 (4 inversores)
Sensores de Entrada • Fase 3 • Miércoles 19 de Noviembre • Deberán ser capaces de adquirir la información proveniente de los leds para indicar la aparición de líneas • Reflective Object Sensor OPB706A, (alternativa: led y fototransistor) • Comparador LM339A • Resistencias • Latch y decodificación
Proyecto Final • Fase 4 • El carro debe moverse, por lo que todo el sistema debera ser alimentado por baterias • Necesitan una forma de sostener las baterias • Regulador de voltaje • Capacitores
Motor a Pasos Unipolar Bipolar Los motores bipolares usualmente tienen 4 conexiones Estos motores no tienen conexión central común Tienen dos conjuntos de bobinas independientes Se pueden distinguir de los unipolares midiendo la resistencia entre las conexiones Dos conexiones deben tener la misma resistencia mientras que las otras dos marcaran no conexión • Este tipo de motor tiene de 5 a 6 conexiones y 4 bobinas • Realmente son 2 bobinas dividas por conexiones centrales • Las conexiones centrales deben ser conectadas a voltaje de alimentación • Son llamados unipolares porque el voltaje siempre llega por este polo.
Motor a Pasos • Cuando energizamos una bobina del motor, el eje del motor se alinea de acuerdo a los polos de la bobina energizada • Cuando las bobinas son energizadas en cierta secuencia, el eje se alinea de acuerdo a la secuencia y por lo tanto rota
Paso Completo • El motor puede rotar en paso completo o medio paso. En el paso completo se usa la siguiente secuencia
Medio Paso • El motor puede girar solo medio paso por medio de la siguiente secuencia
Paso Completo (Bipolar) • Motor Bipolar tiene una construcción mas sencilla debido a que tiene dos bobinas sin punto central y un imán al centro • La secuencia del paso completo se muestra a continuación.
Interfaz con el Motor • H-Bridge Motor Drive • LD293D
Interfaz con el Motor • Transistores Darlington • ULN2803
Interfaz con el motor • Motor Bipolar