Download
1 / 55
550 likes | 779 Views
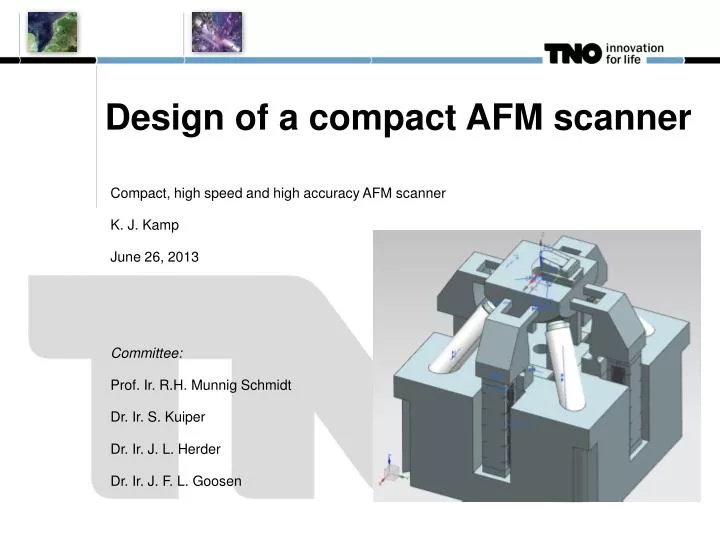
Design of a compact AFM scanner. Compact, high speed and high accuracy AFM scanner K. J. Kamp June 26, 2013 Committee: Prof . Ir. R.H. Munnig Schmidt Dr. Ir. S. Kuiper Dr. Ir. J. L. Herder Dr. Ir. J. F. L. Goosen. Outline. Introduction to Atomic Force Microscopes (AFM)

E N D
Design of a compact AFM scanner Compact, high speed and high accuracy AFM scanner K. J. KampJune 26, 2013 Committee: Prof. Ir. R.H. MunnigSchmidt Dr. Ir. S. Kuiper Dr.Ir. J. L. Herder Dr. Ir. J. F. L. Goosen
K. J. Kamp Design of a compact AFM scanner Outline • Introduction to Atomic Force Microscopes (AFM) • Research questions • Requirements and specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion
K. J. Kamp Design of a compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Introduction
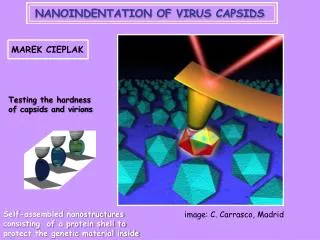
K. J. Kamp A compact AFM scanner Introduction The atomic force microscope (AFM) • Basic operation principle • Probe tip attached to a cantileveris scanned over a sample • Cantilever deflects due to the atomic forces • The cantilever deflectionmeasures the surface topography
K. J. Kamp A compact AFM scanner Introduction The AFM scannerLateral scanning • Triangularpattern • Constant tip speed x z y
K. J. Kamp A compact AFM scanner Introduction The AFM scannerVertical scanning • Feedback loop • Cantilever deflection signal minimal • The probe tip tracks the topography DOI wafer AFM measurement
K. J. Kamp A compact AFM scanner Introduction AFM system specifications • Surface area (x,y) <15mm x 15mm • Measurement range (x,y,z) >10 x 10 x 2 microns • Imaging time < 1 s • Measurement uncertainty < 1 nm
K. J. Kamp A compact AFM scanner Top View Introduction z y Concept 1:The tripod scanner x Sensor Sensor Actuator 3 u3 Actuator 1 Actuator 2 u2 u1 Sensor
K. J. Kamp A compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Research Questions
K. J. Kamp A compact AFM scanner Research questions • How do the specifications of the AFM system translate to the requirements of the AFM scanner? • Does the first scanner concept meet the requirements? • Does the second scanner concept meet the requirements? • Is the second scanner concept valid as a real world design?
K. J. Kamp A compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Requirements
K. J. Kamp A compact AFM scanner Requirements Research question 1:How do the specifications of the AFM system translate to the requirements of the AFM scanner? • Measurement uncertainty < 1 nm Translate to scanner roll angles • Imaging time < 1 s Translate to scanner resonance frequencies
K. J. Kamp A compact AFM scanner Requirements Measurement uncertainty to roll angle • Misalignment sensors and probe tip: 0,5 mm • Scanner will rotate (roll angle) → This causes an Abbeerror (measurement uncertainty)
K. J. Kamp A compact AFM scanner Requirements Abbe error • Platform roll angle φ • Sensor offset δ • Abbe error: eabbe = δ tan(φ)Assumptions: δ = 0,5 mmeabbe < 1,0 nm φ < 2 microrad
K. J. Kamp A compact AFM scanner Requirements Imaging time to resonance frequencies • Lateral resonance frequency > 10 kHz Triangular wave frequency content • Vertical resonance frequency > 30 kHzTracking error, scanning speed x z y
K. J. Kamp A compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Concept 1
Design of a compact AFM scanner Concept 1 Analysis of the tripod concept Kinematics related to scanner stroke Statics related to scanner roll angles (Abbe error) Dynamics related to scanner resonance frequencies
K. J. Kamp A compact AFM scanner Concept 1 z y Kinematics analysis Required stroke: 10 x 10 x 2 microns • Relation is found between x, y, z (platform position) u1, u2, u3 (actuators) x u3 u1 u2
K. J. Kamp A compact AFM scanner Concept 1 Example • Ten scan lines 10 x 10 microns • Actuatordisplacement~ 6 microns • Mechanical amplification 10 / 6 = 1.66
K. J. Kamp A compact AFM scanner Concept 1 z y Scanner roll angle • Hinges are not perfect • Lateral motion will cause the scanner to roll x u3 u1 u2
Titel van de presentatie Concept 1 2D Statics analytical model
K. J. Kamp A compact AFM scanner Concept 1 Main cause of AFM scanner roll • Stiffness ratio between longitudinal and lateral stiffness of a rod Normalized stiffness ratio []
K. J. Kamp A compact AFM scanner Concept 1 Statics • Flexure notch hinges • Increase longitudinal to lateral stiffness ratio • Decreases the roll angle
K. J. Kamp A compact AFM scanner Concept 1 Statics FEM analysis • 3D FEM model
K. J. Kamp A compact AFM scanner Concept 1 Statics FEM results • u1 = 5 microns • x = 5 microns • φ = ~ 460 microrad
K. J. Kamp A compact AFM scanner Concept 1 Statics FEM results • Roll angle is lower • φ = ~ 360 microrad
K. J. Kamp A compact AFM scanner Concept 1 Statics FEM results • Circular notch hinge • Roll angle even lower • φ=~ 60 microrad
K. J. Kamp A compact AFM scanner Concept 1 Dynamics • First four resonances:
K. J. Kamp A compact AFM scanner Concept 1 FEM Modal analysis • Eigenmode results Yaw9,8 kHz Lateral9,3 kHz Roll42 kHz Vertical 48 kHz
K. J. Kamp A compact AFM scanner Concept 1 SummaryCan the requirements be met? • Trade-off low roll angle vs. high resonance frequencies • Low roll angles require a high stiffness ratio (low lateral stiffness) • High resonance frequencies require high stiffness overall Conclusion: The individual requirements can not all be met. Concept 1 is not feasible
K. J. Kamp A compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Concept 2
K. J. Kamp A compact AFM scanner Concept 2 • Orthogonal scanning conceptLateral motion Side view Top view Probe tip Sensor Sensor Actuator Actuator
K. J. Kamp A compact AFM scanner Concept 2 • Orthogonal scanning conceptVertical motion Side view Top view Probe tip Sensor Sensor Actuator Actuator
K. J. Kamp A compact AFM scanner x Concept 2 Kinematics Lateral stroke:mechanical amplification = lever ratio b to a ulever b a
z K. J. Kamp A compact AFM scanner φ x uφ L ux uφ Concept 2 uz K1 ux uz Statics analysis Analytical model adapted to the orthogonal concept L2 K2 K2 ulever
K. J. Kamp A compact AFM scanner Concept 2 Analytical model and FEM analysis • Pure lateral input (no lever)ux = 5 microns • Analytical model: φ = 21,7 microrad • FEM resultφ = 22,9 microradThe roll angle φ is positive
K. J. Kamp A compact AFM scanner uφ ux uz Concept 2 b a Including the lever • Input uxresults in a positive roll angle • Input uφresults in a negative roll angle ulever positive negative ux uφ
K. J. Kamp A compact AFM scanner Concept 2 • Analytical model and FEM results • The length of the vertical rods is varied: • The roll angle shifts from negative to positive
K. J. Kamp A compact AFM scanner Concept 2 • The analytical model is used to find zero roll angle Vertical rod length [m]
K. J. Kamp A compact AFM scanner Concept 2 Resulting roll angle Final iteration L1 = 3,0 mmL2 = 4,0 mm ulever= 10 microns x = 4,9 microns Roll angleφ = -0,63 microrad
K. J. Kamp A compact AFM scanner Concept 2 Lateral: Dynamics FEM modal results Lateral eigenmodes(x,y):~12,3 kHzVertical mode (z): ~36,5 kHz Vertical:
K. J. Kamp A compact AFM scanner Concept 2 Summary • The orthogonal scanner concept meets all the requirements • The stroke of 10 x 10 x 2 microns can be achieved • The roll angle is ~ 0,64 microrad • The resonance frequencies are 12,3 kHz lateral 43,4 kHz vertical
K. J. Kamp A compact AFM scanner • Introduction • Research Questions • Requirements specifications • Concept 1 • Concept 2 • Detailed Design • Conclusion Detailed design
K. J. Kamp A compact AFM scanner Detailed design Component selection • Piezo actuators • Triangulation sensors • AFM chip holder
K. J. Kamp A compact AFM scanner Detailed design Piezo actuators • PI (PhysikInstrumente) • 5 x 5 x 9 mm for vertical motion • 3 x 3 x 13,5 mm for lateral motion
K. J. Kamp A compact AFM scanner Detailed design Triangulation sensors • Lion Precision capacitive sensors
K. J. Kamp A compact AFM scanner Detailed design AFM chip holderBrukerDAFMCH probe holder Piezo holder measures 4 x 5 mm at the base.
K. J. Kamp A compact AFM scanner Detailed design Probe holder Final design overview • Outer dimensions (x,y): 26 x 26 mm Lever Sensor Piezo actuator
K. J. Kamp A compact AFM scanner Detailed design Cross-section view (no piezo actuators)
K. J. Kamp A compact AFM scanner Detailed design