Download

1 / 36
360 likes | 772 Views
Truck suspensions. z s. sprung mass (body) M s. suspension spring. suspension damper. z u. unsprung mass (wheel, axle) M u. z r. tyre stiffness K t. Conventional passive suspension. Active suspension. z s. M s. sensor data. high bandwidth actuator. m C. control signal. z u.

E N D
zs sprung mass(body) Ms suspension spring suspension damper zu unsprung mass(wheel, axle) Mu zr tyre stiffness Kt Conventional passive suspension
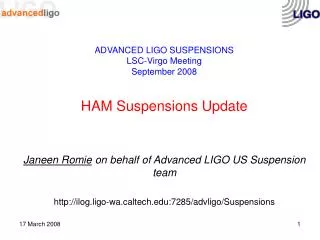
zs Ms sensordata high bandwidthactuator mC controlsignal zu sensordata Mu zr Kt (a) zs Ms sensordata Static load supportedby passive spring High BWactuator mC Ks zu sensordata Mu zr Kt (b) Fully-active suspensions Actuator provides totalsuspension force
zs Ms sensordata Lower BWactuator mC damper spring zu sensordata Mu zr Kt Slow-active suspension
Ms sensordata actuator mC Ks sensordata Mu zr Kt Fd Vs dissipativeactuator Vu Fd Semi-active suspension- dissipative forces only
ABC components ECU Active Body Control on Mercedes CL Coupé
Qv = Ap|Vrel| Pst Extension: Vrel < 0 Q2 Vs Fd Ar P1 = Pst + DP V1 P1 PV Ap+Ar P2= Pst P2 Vr Pst V2 Pst Vu Vrel = Vu- Vs Fd
Qv = Ar|Vrel| Pst Contraction: Vrel > 0 Q1 Fd Vs Ar P1 = Pst + DP V1 P1 PV Ap+Ar Vr V2 Pst P2=P1 P2 Pst Vu P1 = P2 = Pst + DP Vrel = Vu- Vs Fd
orificeflows T solenoid P LVDT B A flow Qv flow Qv Xv spooldisplacement pressureP1- DP pressureP1 Proportional control valve
Mechanical design • Determine the leading functional dimensions of the damper • rod length and diameter; • inner tube bore; • outer tube bore Remember the important specification that the bump and rebound force-velocity characteristics are to be symmetrical.
Damper design • Convert the pressureflow envelope of figure 7 to a damping forcerelative velocity envelope for your design. • Make plots on this chart of the damper force Fd versus relative velocity Vrel for values of Xv = 0.1, 0.2, 0.3, 1.0. • Make a separate plot of Fd versus Xv for different values of Vrel.
Vrel MSD forcecommand Damper force Fdsa Spoolpositioncontroller Xvc Xv Fd + Forcecontroller Damperdynamics - Forcetransducer Force controller
Vrel Xvff Nonlinearfeedforwardcontroller + Xvfb Linearfeedbackcontroller Spool anddamperdynamics Xvc Fd + + Fdsa - Forcetransducer Feedforward + Feedback
Force controller design • Given the linearised plant model, design a PI or PID controller for a chosen nominal operating condition, and check its robustness against changes in operating point. • A suggested nominal operating condition is Fd0 = 2500 N, Vrel0 = 0.15 m/s. • Recall the specification that the desired bandwidth for the force controller is 20 Hz.
Alternative controller design • Use the Ziegler-Nichols ‘ultimate sensitivity’ method to design a PI or PID controller. • That is, initially set the integral and derivative gains to zero, and increase the proportional gain until the system oscillates on the point of instability. • Then measure the ‘ultimate gain’ Ku and the ‘ultimate period’ Pu, and apply the tuning rules to obtain a first-cut set of values for the controller gains.
(4) (5) MSD controller design • Design a real-time program for the HC12 microcontroller to perform the semi-active damper control task. • The MSD control law is defined in equations (4) and (5). Suitable initial parameter values are Cm = 45 kN/(m/s) and = 0.2.
Implementation • Then implement your program in a hardware-in-the-loop simulation, using the SIMULINK model HiL_sys provided. • The roadway roughness input can be selected to be deterministic (e.g., sinusoidal corrugations) or random (corresponding to a road profile that could be encountered on a main road at 70 km/h). • Time histories of simulation variables will be written into the MATLAB workspace, so that the performance of the controller can be assessed.
Design tools provided • SIMULINK model, SIM_sys • This is identical with HiL_sys, except that a subsystem block HC12 is included as a representation of the microcontroller. • You can modify this block to create your own SIMULINK representation of your controller code, to test its operation before attempting the HiL simulation. • Ziegler-Nichols tuning tool fctrl • invoke withfctrl_start
PID controllers • PID = Proportional + Integral + Derivative • Also known as "three-term controller" • About 90% of all control loops are closed with some form of PID controller • In this group of lectures we will find out: • why PID controllers are used so often • ways of "tuning" a PID controller • how to deal with actuator saturation
W load disturbance Controller Plant + R E U Y + + Gc(s) Gp(s) sensederror control output referenceinput, orset-point - + N + sensornoise Functions of control system • Track reference input, or maintain set point, despite: • load disturbances (usually low frequency) • sensor noise (usually high frequency) • Achieve specified bandwidth, and transient response characteristics
W load disturbance Controller Plant + R E U Y + + Gc(s) Gp(s) sensederror control output referenceinput, orset-point - + N + sensornoise Performance of control system • Sensor noise reproduced just like reference input • use low noise sensors! • seek to make • To reject disturbances, make
P P Kp Kp e(t) u(t) E(s) U(s) I I + + D D PID controller functions • Output feedback • from Proportional action • Eliminate steady-state offset • from Integral action • Anticipation • from Derivative action compare output withset-point apply constant control even when error is zero react to rapid rate of change before error grows too big
derivative time constant integral time constant,or 'reset time' Transfer function of PID controller • If no derivative action, we have PI controller: proportional gain integral gain
Example: pole at origin increases Type No. o j Plant poles o o o zeros pull root locus branchesto left: stabilising Closed-loop poles for Kp = 11.5 Effects on open-loop transfer function • s-plane
problem!amplifies highfreq. noise amplitude boostat low frequenciesto reduce steady-state error LogMag log w 0dB +90º Phase -90º phase lead to increasephase margin, bandwidth Effects on open-loop transfer function • Frequency response
Application of PID control • PID regulators provide reasonable control of most industrial processes, provided performance demands not too high • PI control generally adequate when plant/process dynamics are essentially 1st-order • plant operators often switch D-action off: "dificult to tune" • PID control generally OK if dominant plant dynamics are 2nd-order • More elaborate control strategies needed if process has long time delays, or lightly-damped vibrational modes