Download
1 / 7
70 likes | 228 Views
Design and Objectives Practical at FH Ravensburg-Weingarten 16.07.2007 - 14.08.2007 by David Reis. MAX Sonar System . Supervisors and Team Members. Supervisors and Team Members. Hr. David Reis. Hr. Rudolf Lehn. Dipl.-Ing. Michal Zajac. Prof. Dr.-Ing. Ralf Stetter.

E N D
Design and Objectives Practical at FH Ravensburg-Weingarten 16.07.2007 - 14.08.2007 by David Reis MAX Sonar System
Supervisors and Team Members Supervisors and Team Members Hr.DavidReis Hr.RudolfLehn Dipl.-Ing.MichalZajac Prof. Dr.-Ing.RalfStetter Prof. Dr.-Ing.Andreas Paczynski
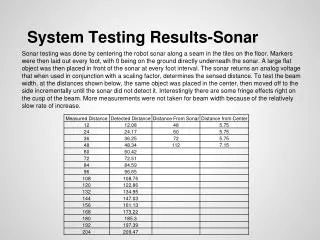
Objectives • Construction of sensor array • 10 distance sensors to perceive surroundings • gyroscope module to calculate angle • Mapping • memorize objects • depending on position • depending on angle • graphical representation of map and situation • Assistance to other components • provide angle to camera and path calculator • avoid bumping into objects
Design • Construction of tower • RS232 -> I2C interface • Master: Linux Debian PC • Ten SRF-02 modules • sonar based • decagonal array • areas slightly overlap • sense distance 6m • minimum 15cm • CMPS-03 • gyroscopic compass • on-board processing
Cooperation and Sources This project was realized in cooperation between Sources • http://tldp.org/linuxfocus/Deutsch/ Archives/lf-2005_02-0365 • http://www.easysw.com/~mike/serial/serial.html • http://www.robot-electronics.co.uk/htm/srf02techSer.htm • http://www.robot-electronics.co.uk/htm/cmps3tech.htm and FH Ravensburg-Weingarten Contact:info-sfz@rlehn.comdavid.reis@t-online.de Contact:paczynski@hs-weingarten.de zajacm@hs-weingarten.de
Thank you for being interested in our project! Gratification