Download
1 / 8
80 likes | 381 Views
Robotic Backhoe with Haptic Display. Project goals System concept Component selection Hydraulic circuit Modeling Kinematic simulation. Project Goals. Purpose of today’s visit is to determine the project goals! Perceived Goals: Apply haptic user interface to backhoe control

E N D
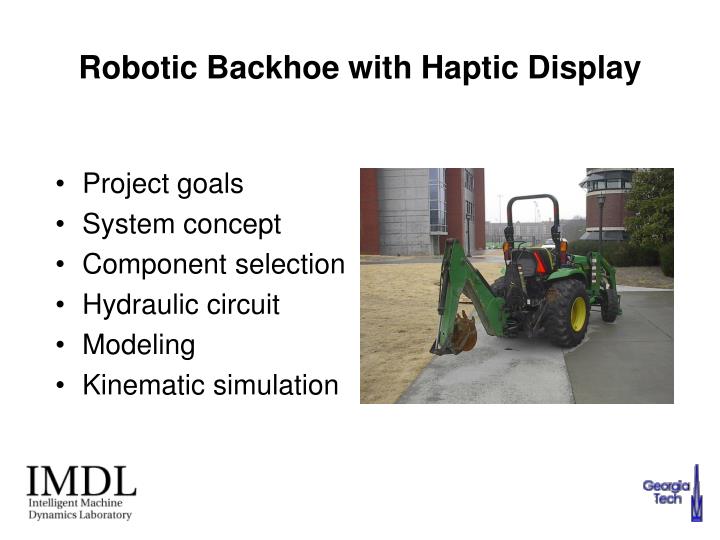
Robotic Backhoe with Haptic Display • Project goals • System concept • Component selection • Hydraulic circuit • Modeling • Kinematic simulation
Project Goals Purpose of today’s visit is to determine the project goals! Perceived Goals: • Apply haptic user interface to backhoe control • Design cost-effective system • Increase operator efficiency • Demonstrate proof-of-concept • Integrate GPS with kinematic positioning for vehicle guidance, avoiding hazards
Joystick position Valve command signals Hydraulic oil flow Joystick w/haptic Display Backhoe Controller Valves Bucket position Haptic forces Pressure Sensors Cylinder pressures Pressure measurements Position Sensors Joint angles Joint angle measurements Robotic Backhoe System Concept Desired bucket position (force input)
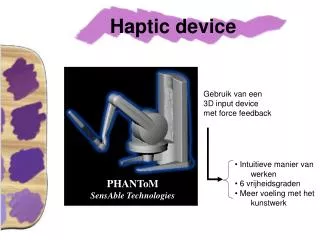
Component Selection Parts tentatively selected thus far: • Joystick w/Haptic Display • Phase 1: Personnel Haptic Interface Mechanism (PHANTOM) • Phase 2: Industrial grade active joystick • Valves • Parker-Hannifin D1FT Proportional Solenoid Valve, or • HUSCO Electro-hydraulic Poppet Valve (EHPV) • Sensors • 2-axis accelerometer tilt sensors, or • Angle encoders • Pressure sensors? • Controller • PC-104 running Matlab/Simulink and x-PC Target
Swing A B P P P A A P P A A P A P P A A M M to existing T T B B T T B B B B T B T T system T Hydraulic Circuit Boom Stick Bucket from existing system
Modeling Operator Joystick Controller Soil Cylinders Backhoe Valves