Download
1 / 39
390 likes | 526 Views
Learning from Infinite Training Examples. 3.18.2009, 3.19.2009 Prepared for NKU and NUTN seminars Presenter: Chun-Nan Hsu ( 許鈞南 ) Institute of Information Science Academia Sinica Taipei, Taiwan. The Ever Growing Web (Zhuang, -400).

E N D
Learning from Infinite Training Examples 3.18.2009, 3.19.2009 Prepared for NKU and NUTN seminars Presenter: Chun-Nan Hsu (許鈞南) Institute of Information Science Academia Sinica Taipei, Taiwan
The Ever Growing Web(Zhuang, -400) • Human life is finite, but knowledge is infinite. Following the infinite with the finite is doomed to fail. • 人之生也有涯,而知也無涯。以有涯隨無涯,殆矣。 • 莊子,西元前四百年
Analogously… • Computing power is finite, • but the Web is infinite. • Mining infinite Web with finite computing power… • is doomed to fail?
Other “holy grails” in Artificial Intelligence • Learning to understand natural languages • Learning to recognize millions of objects in computer vision • Speech recognition in noisy environment, such as in a car
On-Line Learning vs. Off-Line Learning • Nothing to do with human learning by browsing the web • Definition: Given a set of new training data, • online learner can update its model without reading old data while improving its performance. • By contrast, off-line learner must combine old and new data and start the learning all over again, otherwise the performance willsuffer.
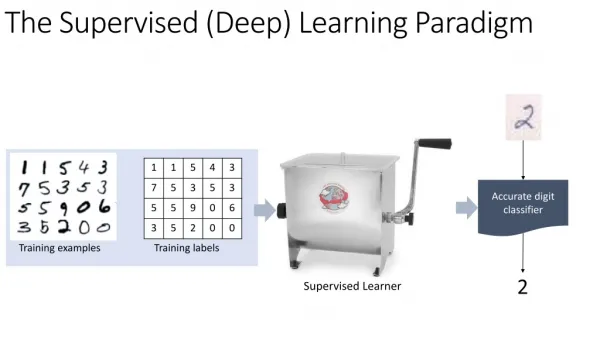
Off-Line Learning • Nearly all popular ML algorithms are off-line today • They scan the training examples many passes iteratively until an objective function is minimized • For example: • SMO algorithm for SVM • L-BFGS algorithm for CRF • EM algorithm for HMM and GMM • Etc.
Single-pass on-line learning • The key for on-line learning to win is to achieve satisfying performance right after scanning the new training examples for a single pass only
Previous work on on-line learning • Perceptron • Rosenblatt 1957 • Stochastic Gradient Descent • Widrow & Hoff 1960 • Bregment Divergence • Azoury & Warmuth 2001 • MIRA (Large Margin) • Crammer & Singer 2003 • LaRank • Borde & Bottou 2005, 2007 • EG • Collins & Peter Bartlet et al. 2008
Stochastic Gradient Descent (SGD) • Learning is to minimize a loss function given training examples
Optimal Step Size(Benveniste et al. 1990, Murata et al. 1998) • Solving gradient = 0 by Newton’s method • Step size is asymptotically optimal if it approaches to
Single-Pass Result (Bottou & LeCun 2004) • Optimum for n+1 examples is a Newton step away from the optimum for n examples
2nd Order SGD • 2nd order SGD (2SGD): Adjusting the step size to approach to Hessian • Good News: from previous work, given sufficiently large training examples, 2SGD achieves empirical optimum in a single pass! • Bad News: it is prohibitively expensive to compute H-1 • e.g. 10K features, H will be a 10K by 10K matrix = 100M floating point array • How about 1M features?
Approximating Jacobian(Aitken 1925, Schafer 1997) • Learning algorithms can be considered as fixed-point iteration mapping =M() • Taylor expansion gives • Eigenvalues of J can be approximated by
Approximating Hessian • Consider SGD mapping as a fixed-point iteration, too. • since J=M’=I-H, we have eig(J)=eig(M’)=eig(I-H), • therefore, (since H is symmetric) eig(J)=1- eig(H) eig(H-1)= / 1-eig(J)= / 1-γ.
Estimating Eigenvalue Periodically • Since the mapping of SGD is stochastic, estimating the eigenvalues at each iteration may yield inaccurate estimations. • To make the mapping more stationary, we use Mb=M(M(…M(θ)…)) • From the law of large number, b consecutive mappings, Mb, will be less “stochastic” • From Equation (4), we can estimate eig(Jb) by b
Experimental Results • Conditional Random Fields (CRF) (Lafferty et al. 2001) • Sequence labeling problems – gene mention tagging
In effect, CRF encodes a probabilistic rule-based system with rules of the form: If fj1(X,Y) & fj2(X,Y) & … & fjn(X,Y) are non-zero, then the labels of the sequence are Y with score P(Y|X) • If we have d features and considers w context, then an order-1 CRF encodes this many rules:
CoNLL 2000 base NP Tag Noun phrases 8936 training 2012 test 3 tags, 1015662 features CoNLL 2000 chunking Tag 11 POS types 8936 training 2012 test 23 tags, 7448606 features Performance measure: F-score: BioNLP/NLPBA 2004 Tag 5 types of bio-entities (e.g., gene, protein, cell lines, etc.) 18546 training 3856 test 5977675 features BioCreative 2 Tag gene names 15000 training 5000 test 10242972 features Tasks and Setups
Feature types for BioCreative 2 O(22M ) rules are encoded in our CRF model!!!
First Pass 23.74 sec Execution TimeCoNLL 2000 base NP
First Pass 196.44 sec Execution TimeCoNLL chunking
First Pass 287.48 sec Execution TimeBioNLP/NLPBA 2004
First Pass 394.04 sec Execution TimeBioCreative 2
Experimental results for linear SVM and convolutional neural net • Data sets
Linear SVM • Convolutional Neural Net (5 layers) ** Layer trick -- Step sizes in the lower layers should be larger than in the higher layer
Mini-conclusion: Single-Pass • By approximating Jacobian, we can approximate Hessian, too • By approximating Hessian, we can achieve near-optimal single-pass performance in practice • With a single-pass on-line learner, virtually infinitely many training examples can be used
Analysis of PSA • PSA is a member in the family of “discretized Newton Methods” • Other well-known members include • Secant method (aka. Quickprop) • Steffensen’s method (aka. Triple Jump) • General form of these methods where A is a matrix designed to approximate the hessian matrix without actually computing the derivative
PSA • PSA is not secant nor is it steffensen’s method • PSA iterates a 2b-step “parallel chord” method (i.e., fixed rate SGD) followed by an approximated Newton step • Off-line 2-step parallel chord method is known to have an order 4 convergence
Are we there yet? • With single-pass on-line learning, we can learn from infinite training examples now, at least in theory • A cheaper, quicker method to annotate labels for training examples • Plus a lot of computers…
The human life is finite, but the knowledge is infinite. Learning from infinite examples by applying PSA to 2nd Order SGD is a good idea!
Thank you for your attention! http://aiia.iis.sinica.edu.tw http://chunnan.iis.sinica.edu.tw/~chunnan This research is supported mostly by NRPGM’s advanced bioinformatics core facility grant 2005-2011.