Download
1 / 25
250 likes | 399 Views
A General Ensemble-Based Approach to Data Assimilation Model Error and Parameter Estimation. Dusanka Zupanski CIRA/Colorado State University Fort Collins, Colorado. LSCE Presentation CEA/Saclay, Gif-sur-Yvette, October 19, 2005. Outline State augmentation approach

E N D
A General Ensemble-Based Approach to Data Assimilation Model Error and Parameter Estimation Dusanka Zupanski CIRA/Colorado State University Fort Collins, Colorado LSCE Presentation CEA/Saclay, Gif-sur-Yvette, October 19, 2005 • Outline • State augmentation approach • Issues of model error estimation - Degrees of freedom of model error - Information content of available data • Current research projects • Future research directions and collaborations Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
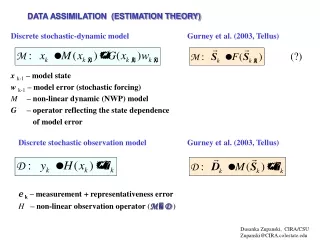
Major sources of forecast uncertainty • Initial conditions • Model errors (e.g., errors in dynamical equations, errors due to unresolved scales) • Parametric errors (errors in empirical parameters) • Forcing errors (e.g., errors in atmospheric forcing in hydrological models) • Boundary conditions (e.g., lateral boundaries) • These uncertainties are not independent! • All sources of uncertainty should be taken into account simultaneously within a unified mathematical approach. • Verified analysis and forecast uncertainty
State Augmentation Approach (Zupanski and Zupanski 2005, MWR) - Dynamical model for standard model state x - Dynamical model for model error (bias) b - Dynamical model for empirical parameters Define augmented state vector w , . And augmented dynamical model F Find optimal solution (augmented analysis) waby minimizing J (MLEF method): Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Issues of Model Error (and Parameter) Estimation State augmentation increases the size of the control variable More Degrees of Freedom (DOF)! Do we need more ensembles? Do we need more observations? What is the number of the effective DOF of an ensemble-based data assimilation and model error estimation system? Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
What is the number of the effective DOF? Answer can be obtained by using the following 3 components within a general framework: • Ensemble Data Assimilation + • State Augmentation + • Information theory Degrees of freedom (DOF) for signal (Rodgers 2000; Zupanski et al. 2005) C - information matrix in ensemble subspace Shannon information content, or entropy reduction Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Information Content AnalysisGEOS-5 Single Column Model Nstate =80; Nobs =80 ds measures effective DOF of an ensemble-based data assimilation system (e.g., MLEF). Useful for addressing DOF of the model error. Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
BIAS ESTIMATION, KdVB model NEGLECT BIAS BIAS ESTIMATION (vector size=101) BIAS ESTIMATION (vector size=10) NON-BIASED MODEL It is beneficial to reduce degrees of freedom of the model error.
MLEF experiments with CSU/RAMS Large Eddy Simulation (LES) model • 23 2-h DA cycles: 18UTC 2 May 1998 – 00 UTC 5 May 1998 (Mixed phase Arctic boundary layer cloud at Sheba site) • Experiments initialized with typical clean aerosol concentrations • May 4 was abnormal: high IFN and CCN above the inversion • x= 50m, zmax= 30m (2d domain: 50col, 40lev), t=2s, Nens=48 • Sophisticated microphysics in RAMS/LES • Control variables: _il, u, v, w, N_x, R_x (8 species), IFN, CCN (dim= 22 variables x 50 columns x 40 levels = 44000) • Radar/lidar observations of IWP, LWP (LWDN, SWDN in future) Acknowledgements Gustavo Carrió, William Cotton, and Milija Zupanski (CSU)
RAMS/LES CONTROL Better timing of maxima EXP LWP is also assimilated VERIF
RAMS/LES CONTROL Improved timing and locations of the maxima EXP NO vertical structure is assimilated (LWP) VERIF
RAMS/LES IFN below inversion as cloud forms IFN above the inversion, as observed Independent observation
More results will be presented by Carrió at the AGU Fall meeting in San Francisco (Arctic clouds session)
MODELING FRAMEWORK SiB-RAMS typically run with several nested grids covering a continental scale meteorological fields CO2 fields and fluxes LPDM run on any subdomain extracted from SiB-RAMS influence functions inversion techniques CO2 observations Bayesian MLEF corrected within each inversion cycle corrected CO2 fluxes Courtesy of M. Uliasz
Implementation for a given inversion cycle C – observed concentration k – index over observations (sampling times and towers) i – index over source grid cell (both respiration & assimilation fluxes) C*R.A – influence function integrated with respiration & assimilation fluxes CIN – background concentration combining effect of the flow across lateral boundaries and initial concentration at the cycle start R A – corrections (biases) to be estimated Courtesy of M. Uliasz
ASSUMPTION: SiB-RAMS is capable to realistically reproduce diurnal cycle and spatial distribution of CO2 (assimilation and respiration) fluxes. Therefore, observation data are used to correct those fluxes for errors in atmospheric transport. time independent corrections to be estimated from concentration data for each inversion cycle CO2 flux respiration & assimilation fluxes simulated by SiB-RAMS Courtesy of M. Uliasz
INVERSION EXPERIMENTS • SiB-RAMS simulation: 15 days starting on July 19th , 2004 on two nested grids • (10 km grid spacing on the finer grid) • LPDM and influence function domain: 600x600km centered at WLEF tower • Concentration pseudo-data were generated for WLEF and the ring of towers • from SiB-RAMS assimilation and respiration fluxes using correction values of 1. • Model-data mismatch error was assumed to be higher for lower towers:2 ppm • for towers>100m, 3 ppm for towers > 50m, and 5 ppm for towers < 50m • three 5 day inversion cycles were performed using Bayesian inversion technique • with concentration pseudo data (initial corrections = 0.5 and their standard • deviations = 0.5)
R : Reduction of uncertainty (0-) Bayesian MLEF
A : Reduction of uncertainty (0-) MLEF Bayesian
Current Research Projects • Precipitation Assimilation (NASA) • Apply MLEF to NASA GEOS-5 column precipitation model • Address model error and parameter estimation • (In collaboration with A. Hou, S. Zhang - NASA/GMAO, C. Kummerow - CSU/Atmos. Sci. Dept.) • GOES-R Risk Reduction (NOAA/NESDIS) • Evaluate the impact of GOES-R measurements in applications to severe weather and tropical cyclones • Information content of GOES-R measurements • (In collaboration with M. DeMaria - CIRA/NOAA/NESDIS, • T. Vonder Haar, L. Grasso, M. Zupanski - CSU/CIRA) • Carbon Cycle Data Assimilation (NASA) • Apply MLEF to various carbon models (LPDM, SiB3, PCTM, and SiB-CASA-RAMS) • Assimilate carbon concentrations globally and locally • Address model error and parameter estimation • (In collaboration with S. Denning, M. Uliasz, K. Gurney, L. Prihodko, R. Lokupitiya, I. Baker, K. Schaefer - CSU/Atmos. Sci. Dept., • M. Zupanski - CSU/CIRA) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Future Research Directions and Collaborations Information content analysis • Quantify value added of new observations (e.g., GPM, CloudSat, GOES-R, OCO) • Determine effective DOF of an ensemble-based data assimilation system • Model bias and parameter estimation requires collaboration • Learning about model errors and uncertainties from different dynamical models • Developing diagnostic tools for new model development Discuss issues for collaboration with NCAR/MMM • Model errors and parameter estimation for WRF model • Information content analysis - effective DOF of WRF data assimilation system Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu