Download
1 / 53
• 560 likes • 767 Views
Amirkabir University of Technology Computer Engineering & Information Technology Department. Mobile Robot Kinematics. سینماتیک. دکتر سعید شیری قیداری & فصل 3 کتاب. Kinematics. سینماتیک. معمولا مطالعه سینماتیک نقطه شروع استاندارد درس روباتیک است .

E N D
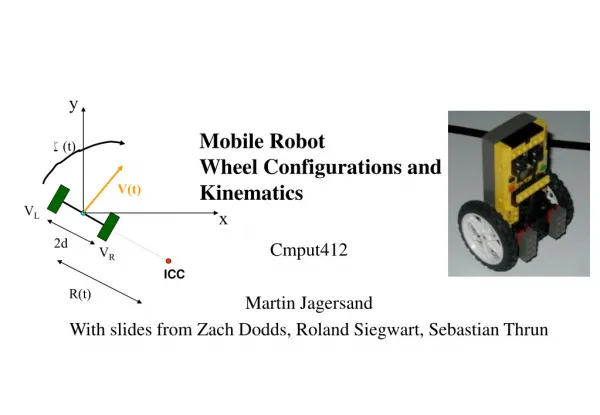
Amirkabir University of TechnologyComputer Engineering & Information Technology Department Mobile Robot Kinematics سینماتیک دکتر سعید شیری قیداری & فصل 3 کتاب
Kinematics سینماتیک • معمولامطالعهسینماتیکنقطهشروعاستاندارددرسروباتیکاست. • سینماتیکعلاوهبرروباتیکدرسایرعلومنظیرگرافیکوانیمیشننیزکاربرددارد. • سینماتیک: • عبارتاستازمطالعهتحلیلیهندسهحرکتروبات: • نسبتبهیکمحورمختصاتثابت • نسبتبهنیروهاویاگشتاوریکهباعثحرکتمیشوند
بحثسینماتیکبرایروباتهایصنعتی Forward kinematics Given joint variables End-effector position and orientation, -Formula?
A 3-DOF Manipulator Arm بحثسینماتیکبرایروباتهایصنعتی • دربحثسینماتیکمستقیمروباتهایصنعتیروشیارائهمیشودکهموقعیتوجهتلینکهاوابزارروباترابصورتتابعیازمتغیرهایمفصلهانسبتبهمحورمرجعمحاسبهمیکند. • برایاینکارفریمهایمختصاتیبههربخشازمکانیزمروباتوصلشدهوسپسارتباطبیناینمحورهابیانمیشود.
بحثسینماتیکمعکوسبرایروباتهایصنعتیبحثسینماتیکمعکوسبرایروباتهایصنعتی Given a desired position (P) & orientation (R) of the end-effector Find the joint variables which can bring the robot the desired configuration
Inverse Kinematics K-1 (q1 … qn) (x,y,z,qx,qy,qz)
2 solutions! بحثسینماتیکمعکوسبرایروباتهایصنعتی • سختترازسینماتیکمستقیماستزیرا: • معادلاتحاصلهغیرخطیبودهوازاینروهمیشهراهحلسیستماتیکیبرایحلآنهابصورت closed form وجودندارد. • راهحلمنحصربفردنیست. • راهحلبستگیبهمشخصاتروباتدارد
Joint 2 Joint 2 q2 Joint 3 Joint 3 q1 Joint 1 Joint 1 yt Tool Coordinate Frame Tool Coordinate Frame zt Link 1 Link 1 z1 z1 zw World (Base) Coordinate Frame World (Base) Coordinate Frame xw Forward and Inverse Kinematics Link Space n variables (q1 … qn) Tool Space 6 variables (x,y,z,qx,qy,qz) Forward K Inverse K
سینماتیکروباتهایمتحرک • مطالعهسینماتیکروباتهایمتحرکدردوزمینهلازماست: • طراحیمناسبروباتبرایانجامعملموردنظر • نوشتننرمافزارکنترلیروباتساختهشده • یکاختلافمهمبینروباتمتحرکوروباتصنعتیدراندازهگیریموقعیتاست. روباتصنعتیدریکنقطهثابتاستلذامیتوانموقعیتآنرانسبتبهایننقطهثابتاندازهگرفت.
کنترلموقعیتیکروبات • برایکنترلموقعیتیکروباتلازماستتامواردزیررابدانیم: • مدلسینماتیکی/ دینامیکیروبات • مدلتعاملبینچرخوزمین • تعریفیازحرکتموردنیاز: • کنترلسرعت- کنترلموقعیت • قانونکنترلیکهنیازمندیهایلازمرابرآوردهمیکند.
تبدیلمختصات • هنگامبررسیموقعیتیکروباتمعمولاعلاقمندهستیمکهموقعیتآنرانسبتبهیکمحورمختصاتمرجعبسنجیم. • درحالیکهحرکتاجزاییکروبوتنظیرچرخها،محلقرارگرفتنسنسورها،وغیرهنسبتبهبدنهروباتاندازهگیریمیشوند. • ازاینرولازماستتاموقعیتروباتویااهدافدیگرراکهنسبتبهموقعیتروباتاندازهگیریمیشوندنسبتبهمحورمختصاتمرجهبیاننمود. • برایاینکارنیازبهتبدیلمختصاتخواهدبود
ضربداخلی Let and be arbitrary vectors in and be the angle from to , then Where qis the angle between the vectors and is the norm. X.Y=0 if X is perpendicular to Y.
ضربداخلی Properties of orthonormal coordinate frame Mutually perpendicular Unit vectors O
O, O’ نمایشنقطهوبردار Point represented in OXYZ: Vector represented in OXYZ:
O, O’ تبدیلمختصات • Reference coordinate frame OXYZ • Body-attached frame O’uvw Point represented in O’uvw: Two frames coincide ==>
تبدیلمختصات • حالتیکهفقطدورانداشتهباشیم چگونهمیتوانمختصاتنقاطایندومحورمختصاترابههمربطداد؟
حالتدورانساده Px , Py , and Pz represent the projections of P onto OX, OY, OZ axes, respectively Since
Basic Rotation Matrix • Rotation about x-axis with
Basic Rotation Matrix Rotation about x axis with
Basic Rotation Matrices Rotation about x-axis with q Rotation about y-axis with q Rotation about z-axis with q
Basic Rotation Matrix Obtain the coordinate of from the coordinate of Dot products are commutative! <== 3X3 identity matrix
Example A point is attached to a rotating frame, the frame rotates 60 degree about the OZ axis of the reference frame. Find the coordinates of the point relative to the reference frame after the rotation.
Composite Rotation Matrix A sequence of finite rotations Matrix multiplications do not commute Rules: If rotating coordinate O-U-V-W is rotating about principal axis of OXYZ frame, then pre-multiply the previous (resultant) rotation matrix with an appropriate basic rotation matrix If rotating coordinate OUVW is rotating about its own principal axes, then post-multiply the previous (resultant) rotation matrix with an appropriate basic rotation matrix
Example Find the rotation matrix for the following operations: Pre-multiply if rotate about the OXYZ axes Post-multiply if rotate about the OUVW axes
Coordinate Transformations • position vector of P in {B} is transformed to position vector of P in {A} • description of {B} as seen from an observer in {A} Rotation of {B} with respect to {A} Translation of the origin of {B} with respect to origin of {A}
Coordinate Transformations • Two special cases • 1. Translation only • Axes of {B} and {A} are parallel • 2. Rotation only • Origins of {B} and {A} are coincident
Homogeneous Representation • Coordinate transformation from {B} to {A} • Homogeneous transformation matrix Rotation matrix Position vector Scaling
Homogeneous Transformation • Special cases 1. Translation 2. Rotation
O, O’ O, O’ h Example • Translation along z-axis with h:
Example • Rotation about the x-axis by
Example • Find the homogeneous transformation matrix (T) for the following operation:
Homogeneous Representation • A frame in space (geometric interpretation) Principal axis n w.r.t. the reference coordinate system
Homogeneous Transformation • Translation
? Homogeneous Transformation Composite Homogeneous Transformation Matrix Transformation matrix for adjacent coordinate frames Chain product of successive coordinate transformation matrices
Homogeneous Transformations With respect to the universal frame , the position of is:
Homogeneous Transformations • This equation can be reduced in a very handsome way by introducing homogenous coordinates and transformation.
سینماتیکروباتهایمتحرک • هدف: توصیفعملکردمکانیکیروباتبهمنظورطراحیوکنترل • سینماتیکرواتهایمتحرکشبیهبهروباتهایصنعتیاستبااینتفاوتکهروباتمتحرکمیتواندآزادانهدرمحیطحرکتنماید. • علاوهبرآنروشمستقیمیبرایاندازهگیریموقعیتروباتنیستوموفعیترابایددرطولزمانباانتگرالگیریازحرکتهایانجامشدهبدستآورد. • اینکارمنجربهایجادخطادراندازهگیریخواهدشد. • مقابلهبااینمسئلهیکیازمباحثجدیدرروباتهایمتحرکمیباشد. • برایفهمحرکتروباتبایدازمحدودیتهائیکهچرخهابرسرراهحرکتایجادمیکنندشروعنمود.
نشاندادنموقعیتروبات • فرضمیشودکهروباتیکجسمصلبباشدکهرویچرخهاقرارگرفتهوبرروییکصفحهحرکتمیکند. • موقعیتروباترامیتوانبادومتغیر x,y درصفحهویکمتغیرqبراینشاندادنجهتآنمشخصنمود
نشاندادنموقعیتروبات • برایاینکارازدوفریممختصاتاستفادهمیشود: • یکیفریممختصاتمرجعو • دیگریفریممحلیکهبررویروباتقراردارد • فریممرجعبصورتزیرنشاندادنمیشود • فریمروباتبصورتزیرنشاندادهمیشود
نشاندادنموقعیتروبات • اگراختلافزاویهبینفریمروباتوفریممرجعبرابرباqبودهومبدافریمروبات (P) درنقطه x,y نسبتبهفریممرجعقرارداشتهباشددراینصورتفریمروباتنسبتبهفریممرجعبصورتزیرنشاندادهمیشود.
نشاندادنموقعیتروبات • برایتوصیفحرکتروباتلازماستتاحرکتدرراستایفریممرجعبهحرکتدرفریمروباتنگاشتشود. برایاینکارازماتریسدورانزیراستفادهمیشود. • برایمثالبرایحالتشکلقبلداریم
مدلسینماتیکمستقیم • هدف: اگرسرعتچرخهایروباتوابعادهندسیآنراراداشتهباشیمحرکتروباتچگونهخواهدبود؟ روباتشکلزیردارایدوچرخهریکباشعاع r بودهوباندازه l ازنقطه P کهدروسطبیندوچرخقرارداردفاصلهدارد. سرعتچرخهابرابربا q1,q2 میباشد. دراینصورتمدلسینماتیکمستقیمروباتبصورتزیرخواهدبود:
محاسبهسینماتیکمستقیم • برایمحاسبهحرکتروباتدرفریممرجعمیتوانتاثیرهریکازچرخهادرفریمروباترامحاسبهکردهونتیجهرابهفریممرجعمنتقلنمائیم. • اگرفرضکنیمکهروباتدرجهتمحور X درحرکتباشدسرعتحرکتنقطه P بازایچرخشهریکازچرخهابصورتزیرخواهدبود: • دریکروباتبادرایودیفرانسیلیمیتواناین دومولفهراباهمجمعنمود
محاسبهسینماتیکمستقیم • مولفه y.اینحرکتصفرخواهدبود. • برایمحاسبهمولفهqدرنظرداشتهباشیداگرفقطچرخراستدورانکندروباتحولچرخچپبهچرخشدرخواهدآمد.سرعتزاویهاینقطه P برابرخواهدبودبا: • بههمینترتیببرایچرخچپداریم باترکیباینروابطمدلسینماتیکیروباتبصورتزیرخواهدبود
محاسبهسینماتیکمستقیم • دراینرابطهمقدارماتریسدورانازرابطهزیربدستمیاید. • درحالتکلیبرایتوصیفحرکتروباتمجبورخواهیمبودتامحدودیتهائیکههرچرخبرحرکتاعملمیکندرانیزدرنظربگیریم.