Download
1 / 65
680 likes | 885 Views
Amirkabir University of Technology Computer Engineering & Information Technology Department. Mobile Robot Kinematics. سینماتیک روباتهای متحرک. دکتر سعید شیری قیداری & فصل 3 کتاب. مقدمه. سینماتیک عبارت است از مطالعه عملکرد سیستم های مکانیکی

E N D
Amirkabir University of TechnologyComputer Engineering & Information Technology Department Mobile Robot Kinematics سینماتیکروباتهای متحرک دکتر سعید شیری قیداری & فصل 3 کتاب
مقدمه • سینماتیکعبارتاستازمطالعهعملکردسیستمهایمکانیکی • مطالعهسینماتیکروباتهایمتحرکدردوزمینهلازماست: • طراحیمناسبروباتبرایانجامعملموردنظر • نوشتننرمافزارکنترلیروباتساختهشده • یکاختلافمهمبینروباتمتحرکوروباتصنعتیدراندازهگیریموقعیتاست. روباتصنعتیدریکنقطهثابتاستلذامیتوانموقعیتآنرانسبتبهایننقطهثابتاندازهگرفت.
نقش چرخها • برایفهمحرکتروباتبایدنقشهریکازچرخهاوهمچنینمحدودیتهائیکههریکازآنهادرحرکتایجادمیکنندبررسیشود.
روبات های چرخدار • چرخ ساده بوده و دارای بازدهی زیادی است. • برای کاربردهای زیادی میتوان از چرخ استفاده نمود. • داشتن فقط 3 چرخ میتواند پایداری را تضمین کند. در صورت استفاده از بیش از 3 چرخ نیازمند سیستم تعلیق مناسب هستیم. • دغدغه های اصلی در روباتهای متحرک که از چرخ استفاده میکنند عبارتند از: قدرت کشش، قدرت مانور و نحوه کنترل
سینماتیکروباتهایمتحرک • سینماتیکروباتهایمتحرکشبیهبهروباتهایصنعتیاستبااینتفاوتکهروباتمتحرکمیتواندآزادانهدرمحیطحرکتنماید. • علاوهبرآنروشمستقیمیبرای اندازهگیریموقعیتروبات وجود نداردوموقعیترابایددرطولزمانباانتگرالگیریازحرکتهایانجامشدهبدستآورد. • اینکارمنجربهایجادخطادراندازهگیریخواهدشد. • مقابلهبااینمسئلهیکیازمباحثجدیدرروباتهایمتحرکمیباشد. • برایفهمحرکتروباتبایدازمحدودیتهائیکهچرخهابرسرراهحرکتایجادمیکنندشروعنمود.
نشاندادنموقعیتروبات • فرضمیشودکهروباتیکجسمصلبباشدکهرویچرخهاقرارگرفتهوبرروییکصفحهحرکتمیکند. • موقعیتروباترامیتوانبادومتغیر x,y درصفحهویکمتغیرqبراینشاندادنجهتآنمشخصنمود
نشاندادنموقعیتروبات • برایاینکارازدوفریممختصاتاستفادهمیشود: • یکیفریممختصاتمرجعو • دیگریفریممحلیکهبررویروباتقراردارد • فریممرجعبصورتزیرنشاندادنمیشود • فریمروباتبصورتزیرنشاندادهمیشود
نشاندادنموقعیتروبات • اگراختلافزاویهبینفریمروباتوفریممرجعبرابرباqبودهومبدافریمروبات (P) درنقطه x,y نسبتبهفریممرجعقرارداشتهباشددراینصورتمختصات فریمروباتنسبتبهفریممرجعبصورت زیرنشاندادهمیشود.
نشاندادنموقعیتروبات • برایتوصیفحرکتروباتلازماستتاحرکتدرراستایفریممرجعبهحرکتدرفریمروباتنگاشتشود.برایاینکارازماتریسدورانزیراستفادهمیشود. • برایمثالبرایحالتشکلقبلداریم
مدلسینماتیکمستقیم • هدف: اگرسرعتچرخهایروباتوابعادهندسیآنراداشتهباشیمحرکتروباتچگونهخواهدبود؟
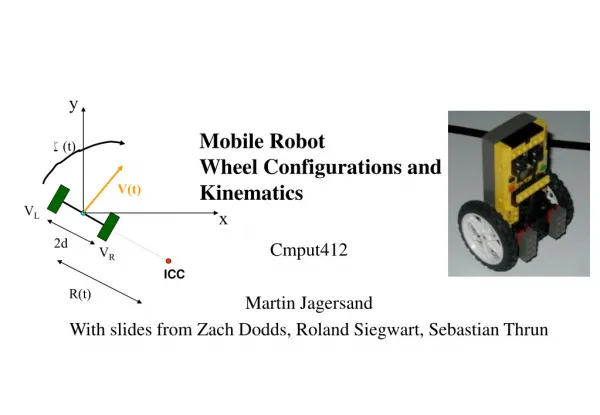
مدلسینماتیکمستقیم • روباتشکلزیردارایدوچرخهریکباشعاع r بودهوباندازه l ازنقطه P کهدروسطبیندوچرخقرارداردفاصلهدارد. سرعتچرخهابرابرباf1, f2میباشد.دراینصورتمدلسینماتیکمستقیمروباتبصورتزیرخواهدبود:
مدلسینماتیکمستقیم • میتوانموقعیتروباتدرفریممرجعرابااستفادهازموقعیتروباتدرفریممحلیوبکاربردنرابطهزیرمحاسبهنمود. • برایاینکارلازماستتاتاثیرهریکازچرخهارادرفریماصلیمحاسبهنمود.
محاسبهسینماتیکمستقیم • برایمحاسبهحرکتروباتدرفریممرجعمیتوانتاثیرهریکازچرخهادرفریمروباترامحاسبهکردهونتیجهرابهفریممرجعمنتقلنمود. • اگرفرضکنیمکهروباتدرجهتمحور X درحرکتباشدسرعتحرکتنقطه P بازای چرخشهریکازچرخهابصورتزیرخواهدبود: • دریکروباتبادرایودیفرانسیلیمیتوانایندومولفهراباهمجمعنمود.
محاسبهسینماتیکمستقیم • مولفه y اینحرکتصفرخواهدبود. • برایمحاسبهمولفهq’درنظرداشتهباشیداگرفقطچرخراستدورانکندروباتحولچرخچپبهچرخشدرخواهدآمد. سرعتزاویهاینقطه P برابرخواهدبودبا: • بههمینترتیببرایچرخچپداریم باترکیباینروابطمدلسینماتیکیروباتبصورتزیرخواهدبود:
محاسبهسینماتیکمستقیم • دراینرابطهمقدارماتریسدورانازرابطهزیربدستمیاید:
مثال • اگرروباتدرموقعیتزیرچرخهاراباسرعتهایمتفاوتیبهحرکتدرآوردخواهیمداشت:
اعمالمحدودیتها • روابطفوقاطلاعاتیدرموردنحوهحرکتروباتدرصورتداشتنسرعتچرخهارابدستمیدهندامادرحالتکلیعلاقمندهستیمکهفضایحرکتهایممکنبراییکروباتباطراحیمشخصرابدانیم. • دراینصورتبرایتوصیفحرکتروباتمجبورخواهیمبودتامحدودیتهائیکههرچرخبرحرکتاعمالمیکندرانیزدرنظربگیریم.
محدودیتهایسینماتیکیچرخها • فرضهائیکهبکارخواهیمبرد: • صفحهچرخهاهمیشهعمودیباقیخواهدماند. • درهرحالتیفقطیکنقطهبرخوردبینچرخوزمینوجوددارد. • چرخهادرنقطهکنتاکتسرنمیخورند. یعنیفقطحرکتچرخشیدارند.
چرخاستانداردثابت • زاویهاینچرخنسبتبهبدنهروباتثابتبودهوفقطحرکتروبهجلوویاعقبدرصفحهچرخانجاممیشود.چرخشدرنقطهبرخوردچرخبازمینصورتمی پذیرد.
چرخاستانداردثابت • بنابهمحدودیتغلتشمیبایستدرمحلبرخوردفقطچرخشخالصداشتهباشیم: مولفههای x, y, q حرکتحاصلازچرخش مجموعحرکتدرصفحهچرخ تبدیلازموقعیتمرجعبهموقعیتروبات
چرخاستانداردثابت • بنابهمحدودیتسرخوردنمیبایستمولفهعمودیموقعیتچرخهانسبتبهصفحهچرخصفرباشد: مولفههای x, y, q مجموعحرکتدرصفحهچرخ تبدیلازموقعیتمرجعبهموقعیتروبات
مثال دراینمثالسرعتدرراستای XIصفرخواهدبودیعنیهمانطورکهانتظارمیرودچرخسرنخواهدخورد
چرخاستانداردهدایتشونده این چرخ دارای یک درجه آزادی بیشتر است ( حول یک محور عمودی می چرخد که از وسط چرخ و محل برخورد با زمین میگذرد). معادلات حرکتی آن مشابه چرخ استاندارد است با این تفاوت که زاویه چرخ با بدنه ثابت نبوده و در طول زمان تغییر میکند.
چرخکاستور اینچرخمیتواندحولیکمحورعمودیچرخشنماید. اینمحورازنقطهبرخوردبازمینعبورنمیکند. اینمحدودیتمثلقبلاست محور چرخش عمودی این چرخ از محل برخورد با زمین نمیگذرد. محدودیت غلتشی آن مشابه چرخ ثابت است. اما وجود افست بین محل اتصال چرخ به بدنه (A) و محور چرخش عمودی(نقطه B ) باعث میشود تا چرخ در مواجهه با هر نیروی عمودی اعمال شده به آن جهت دلخواهی را بخود بگیرد تا به حالت تعادل برسد. دراینجایکپارامتراضافیخواهیمداشت دوپارامترمتغیربازمانداریم: f(t) , b(t)
چرخکاستور • محدودیتهایسرخوردن: • درنقطه A نیروهایجانبیبهچرخواردمیشوند.ازاینروباتوجهبهفاصلهبینایننقطهونقطهبرخوردمحدودیتنداشتنحرکتجانبیاشتباهخواهدبود. • دراینصورتهرنوعحرکتعموددرراستایصفحهچرخباگردشکاستورجبرانخواهدشد. • بازایهرموقعیتروباتمقداریبرایسرعتوجودخواهدداشتکهمحدودیتهایفوقبرآوردهشوند.لذاوجودچرخکاستورمحدودیتیبرایحرکتروباتنخواهدبود.
چرخسوئدی • این چرخ قادر به حرکت بصورت تمام جهت میباشد که در اثر افزودن یک درجه آزادی به چرخ استاندارد ایجاد شده است. • این درجه آزادی ناشی از غلتک ها یا چرخهای کوچکی است که در محیط چرخ اصلی و بصورت عمود بر آن و یا زاویه دار نصب شده اند. • با تر کیب مناسب زاویه بین محور اصلی و زاویه غلتک ها میتوان چرخ را در هر جهتی به حرکت در آورد.
چرخ کروی • این چرخ فاقد هر گونه محور چرخش اصلی است از اینرو هیچ گونه محدودیتی برای حرکت روبات بوجود نمی آورد.
محدودیتهای سینماتیکی روبات متحرک • با داشتن محدودیتهای سینماتیکی چرخها میتوان محدودیتهای سینماتیکی روبات را بدست اورد: • هر چرخ استاندارد یک محدودیت سینماتیکی را به روبات اعمال میکند. • چرخ کاستور، چرخ سوئدی و چرخهای کروی محدودیت سینماتیکی خاصی بر روی روبات اعمال نمیکنند. • لذا کافی است تا این محدودیت برای چرخهای استاندارد محاسبه شود.
محدودیتهای سینماتیکی روبات متحرک • قدرت مانور روبات با در نظر گرفتن محدودیت سینماتیکی چرخها چگونه محاسبه میشود؟ • اگر تعداد کل چرخهای ثابت و متحرک را بصورت زیر در نظر بگیریم: N=Nf+Ns
محدودیتهای سینماتیکی روبات متحرک موقعیت چرخشی چرخهای ثابت و متحرک حول محور افقی • محدودیت چرخش همه چرخها را میتوان بصورت یک ماتریس نشان داد:
محدودیتهای سینماتیکی روبات متحرک • به همین ترتیب محدودیت سر خوردن همه چرخها را میتوان بصورت ماتریس زیر نشان داد.
مثال: روبات دیفرانسیلی • با جمع کردن محدودیت های فوق بصورت یک ماتریس داریم: • از چرخ هرزگرد صرفنظر میشود و برای دو چرخ دیگر محدودیت های به و خلاصه میشود. • اگر روبات در جهت در حال حرکت باشد، برای چرخ راست داریم : و برای چپ:
مثال: روبات دیفرانسیلی • که با جایگرینی داریم: • با معکوس کردن رابطه فوق خواهیمداشت:
قابلیت مانور روبات • بزرگترین عاملی که قابلیت مانور روبات را محدود میکند، الزام چرخها در بر آورده کردن محدودیت سر خوردن است. • روبات علاوه بر حرکت سینماتیکی لحظه ای میتواند موقعیتش را در طول زمان با فرمان دادن به چرخها تغییر دهد. • بنابر این قدرت مانور روبات ترکیبی از محدودیت چرخهای ثابت در مقابل سرخوردن و درجه آزادی ناشی از فرمان پذیری چرخها خواهد بود.
درجه تحرک پذیری • محدودیت سر خوردن چرخهای ثابت و متحرک عبارت است از: • از لحاظ ریاضی برآوردن کرده شروط فوق مستلزم قرار گرفتن در میباشد. • از لحاظ گرافیکی این معنا را میتوان با استفاده از تعریف مرکز لحظه ای دوران نشان داد.
خط Zero Motion • یک چرخ ثابت حول محوری میچرخد که در آن هیچ حرکتی نخواهد داشت. • بعبارت دیگر چرخ در هر لحظه حول دایره ای میچرخد که مرکز آن در روی این خط قرار دارد. وقتی که این نقطه در بی نهایت قرار داشته باشد چرخ در روی خط راست حرکت خواهد نمود. • برای روبات با بیش از یک چرخ فقط یک مرکز لحظه ای دوران خواهیمداشت که از برخورد خطوط zero Motion بدست میآید.
قدرت مانور روبات متحرک • عبارت است از مجموع درجات آزادی که روبات قادر به کنترل آنهاست. • که برابر است با درجه آزادی که روبات با تغییر سرعت چرخها بدست میآورد به اضافه درجه آزادی که از کنترل زاویه چرخها حاصل میشود.
روبات Holonomic • یک روبات هولونومیک روباتی است که محدودیت سینماتیکی غیر هولونومیکی نداشته باشد. • محدودیت سینماتیکی هولونومیکی به محدودیتی گفته میشود که فقط تابعی از موقعیت روبات باشد. ( فاقد عبارت مشتق باشد) • برای روباتی با یک چرخ ثابت این محدودیت باید فقط شامل عبارات باشد. • محدودیت سر خوردن یک محدودیت غیر هولونومیکی است زیرا تابعی از است.
مثال • آیا دو چرخه ای که هر دو چرخ آن ثابت شده باشند هولونومیک است؟ • اگر فضای کاری روبات را محدود به یک خط راست بکنیم که در امتداد محور x قرار داشته باشد در نتیجه محدودیت سینماتیکی سر خوردن روبات به • تبدیل میشود و محدودیت غلتش را میتوان بصورت زیر نوشت: برای چنین روباتی محدودیت ها وجود دارند اما هولونومیک هستند!