Download
1 / 5
70 likes | 433 Views
Two-degree-of-freedom powered prosthetic wrist. Peter J. Kyberd, PhD; Edward D. Lemaire, PhD; Erik Scheme, MSc; Catherine MacPhail, BSc; Louis Goudreau, BASc, Peng; Greg Bush, BA, CP(c); Marcus Brookeshaw, BSc. Study Aim

E N D
Two-degree-of-freedom powered prosthetic wrist Peter J. Kyberd, PhD; Edward D. Lemaire, PhD; Erik Scheme, MSc; Catherine MacPhail, BSc;Louis Goudreau, BASc, Peng; Greg Bush, BA, CP(c); Marcus Brookeshaw, BSc
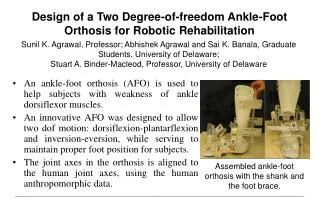
Study Aim • Describe design for 2-degree-of-freedom (DOF) wrist based around differential mechanism combining wrist flexion/extension and pronation/supination. • Relevance • To be practical, prosthetic arm must balance dexterity, space, and weight. These constraints typically limit DOFs to single axis. • Multiple-DOF wrists can improve hand positioning, reduce need for compensatory arm motions to position hand, and make activities easier to perform.
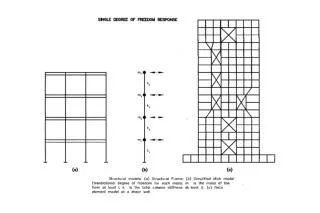
Wrist Actions 2-DOF wrist based around differential mechanism combining wrist flexion/ extension and pronation/ supination: (a) Pronation and supination occur when both motors turn in same direction so that two sides of differential rotate in opposite directions. (b) Flexion and extension occur when two motors oppose each other across differential and torque is set up to flex joint.
Wrist Designs First-generation wrist design with axes indicated. Joint positions are inferred from readings of potentiometers placed on middle gear (potentiometer locations indicated in image). Second-generation 2-axis wrist with Otto Bock transcarpal hand mounted on distal end for comparison with conventional size 7 3/4 hand. Pronation axes are aligned.
Conclusions • Feasibility of designing compact, 2-DOF prosthetic wrist that may improve functionality of any prosthetic hand was demonstrated by creating hand orientation that closely matches grasp requirements. • Best method to control additional DOFs remains unsolved: • Unless active wrists can be used quickly and with low mental effort, only users with multiple impairments and greater need for function are likely to benefit . • Pattern-recognition control may be viable solution.