Download
1 / 14
270 likes | 751 Views
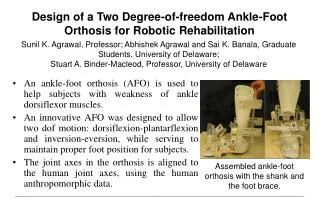
TWO DEGREE OF FREEDOM PID CONTROLLER DESIGN USING GENETIC ALGORITHMS. Daniel Czarkowski Polish Register of Shipping, Gdańsk, POLAND d.czarkowski@prs.pl. Tom O’Mahony Cork Institute of Technology, Department of Electronic Engineering, Cork, IRELAND. Overview. 2- DOF PID controller

E N D
TWO DEGREE OF FREEDOM PID CONTROLLER DESIGN USING GENETIC ALGORITHMS Daniel Czarkowski Polish Register of Shipping, Gdańsk, POLANDd.czarkowski@prs.pl Tom O’Mahony Cork Institute of Technology, Department of Electronic Engineering,Cork, IRELAND
Overview • 2- DOF PID controller • Design strategy • Genetic Algorithms • A solution of reduction computation time • Models • Results • Summary of work • Conclusions
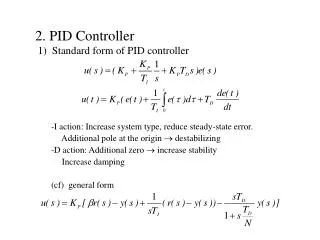
2-DOF PID controller • Controller structure • Control law • 6 variables to tune
Design strategy • Performance & robustness • Performance • IAE servo + regulator • Robustness 1) Gain and phase margin 2) Gain and phase margin 3) Modulus margin 4) Maximum value of the input sensitivity function
Why Genetic Algorithms? Avoid your local minimum!
Direct the GA • GA optimisation problem • Penalty factors on gain and phase margins
GA with look up table • Gray coding • Population of 100 • Single Point Crossover • Stochastic Universal Sampling • Matrix: 2342 rows and 7 columns • MATLAB find function Reduced the execution time up to 60%!
Models • Benchmark test • Inverse unstable system • Integrating systems • Underdamped system • Conditionally stable system • 3 models with time delay • 11 models were evaluated (K. J. Åström 1998, 2000)
Results, I The fourth design gives sluggish response?
Summary of work • Four robust designs have been proposed • Direct the GA • Eleven models evaluated • A solution to speed up the GA optimisation • The two degree of freedom controller well performs for systems such as: stable, inverse unstable, non-minimum phase, integrating long time-delay. • Model uncertainty has not been discussed, however from my experience the fourth design performs well in this case as well as implemented to real-time systems.
Conclusions • None of the proposed methods performs significantly better. However, even though the responses from the third design are not as fast as from the first design, it can be summarised that this design gives slightly better results than the other counterparts. • The fourth design directly penalises the impact of the high frequency measurement noise on the closed-loop system. • The GA with look up table significantly reduced the computation time.
Questions? Daniel Czarkowski my e-mail: d.czarkowski@prs.pl