Download
1 / 128
1.52k likes | 2.28k Views
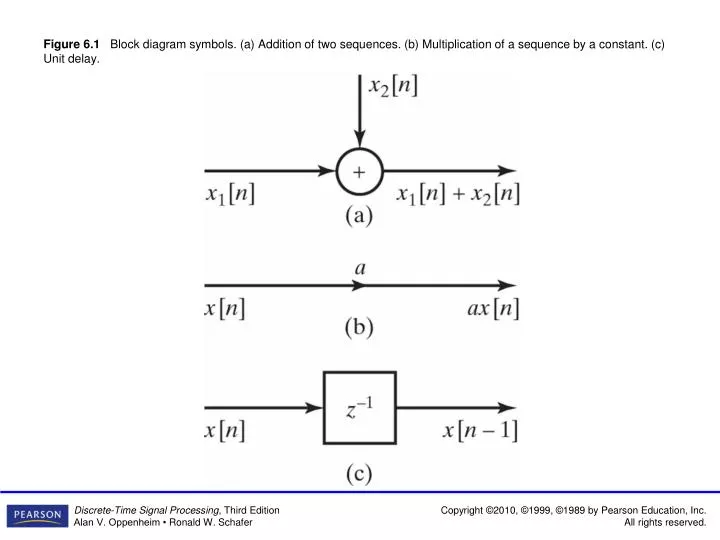
Figure 6.1 Block diagram symbols. (a) Addition of two sequences. (b) Multiplication of a sequence by a constant. (c) Unit delay. Figure 6.2 Example of a block diagram representation of a difference equation.

E N D
Figure 6.1 Block diagram symbols. (a) Addition of two sequences. (b) Multiplication of a sequence by a constant. (c) Unit delay.
Figure 6.2 Example of a block diagram representation of a difference equation.
Figure 6.3 Block diagram representation for a general Nth-order difference equation.
Figure 6.4 Rearrangement of block diagram of Figure 6.3. We assume for convenience that N = M. If N ≠M, some of the coefficients will be zero.
Figure 6.8 Example of nodes and branches in a signal flow graph.
Figure 6.9 Example of a signal flow graph showing source and sink nodes.
Figure 6.10 (a) Block diagram representation of a 1st-order digital filter. (b) Structure of the signal flow graph corresponding to the block diagram in (a).
Figure 6.11 Signal flow graph of Figure 6.10(b) with the delay branch indicated by z−1.
Figure 6.14 Signal flow graph of direct form I structure for an Nth-order system.
Figure 6.15 Signal flow graph of direct form II structure for an Nth-order system.
Figure 6.18 Cascade structure for a 6th-order system with a direct form II realization of each 2nd-order subsystem.
Figure 6.19 Cascade structures for Example 6.5. (a) Direct form I subsections. (b) Direct form II subsections.
Figure 6.20 Parallel form structure for 6th-order system (M = N = 6) with the real and complex poles grouped in pairs.
Figure 6.21 Parallel form structure for Example 6.6 using a 2nd-order system.
Figure 6.22 Parallel form structure for Example 6.6 using 1st-order systems.
Figure 6.23 (a) System with feedback loop. (b) FIR system with feedback loop. (c) Noncomputable system.
Figure 6.24 (a) Flow graph of simple 1st-order system. (b) Transposed form of (a). (c) Structure of (b) redrawn with input on left.
Figure 6.26 Transposed direct form II structure for Example 6.8.
Figure 6.27 General flow graph resulting from applying the transposition theorem to the direct form I structure of Figure 6.14.
Figure 6.28 General flow graph resulting from applying the transposition theorem to the direct form II structure of Figure 6.15.
Figure 6.32 Direct form structure for an FIR linear-phase system when M is an even integer.
Figure 6.33 Direct form structure for an FIR linear-phase system when M is an odd integer.
Figure 6.34 Symmetry of zeros for a linear-phase FIR filter.
Figure 6.35 One section of the lattice structure for FIR lattice filters. (a) Block diagram representation of a two-port building block (b) Equivalent flow graph.
Figure 6.36 Cascade connection of M basic building block sections.
Figure 6.37 Lattice flow graph for an FIR system based on a cascade of M two-port building blocks of Figure 6.35(b).
Figure 6.38 Algorithm for converting from k-parameters to FIR filter coefficients.
Figure 6.39 Algorithm for converting from FIR filter coefficients to k-parameters.
Figure 6.40 Flow graphs for example. (a) Direct form. (b) Lattice form (coefficients rounded).
Figure 6.41 One stage of computation for an all-pole lattice system.
Figure 6.43 Signal flow graph of IIR filter; (a) direct form, (b) lattice form.
Figure 6.44 Nonlinear relationships representing two’s-complement (a) rounding and (b) truncation for B = 2.
Figure 6.45 Two’s-complement rounding. (a) Natural overflow. (b) Saturation.
Figure 6.46 Implementation of discrete-time filtering of an analog signal. (a) Ideal system. (b) Nonlinear model. (c) Linearized model.
Table 6.1 UNQUANTIZED DIRECT-FORM COEFFICIENTS FOR A 12TH-ORDER ELLIPTIC FILTER
Figure 6.47 IIR coefficient quantization example. (a) Log magnitude for unquantized elliptic bandpass filter. (b) Magnitude in passband for unquantized (solid line) and 16-bit quantized cascade form (dashed line).
Table 6.2 ZEROS AND POLES OF UNQUANTIZED 12TH-ORDER ELLIPTIC FILTER.
Figure 6.48 IIR coefficient quantization example. (a) Poles and zeros of H(z)for unquantized coefficients. (b) Poles and zeros for 16-bit quantization of the direct form coefficients.