Download
1 / 9
100 likes | 367 Views
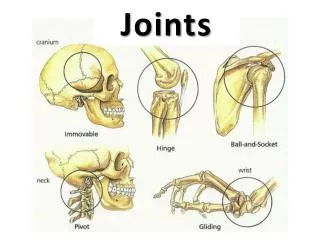
Joints. Revolute Joint (1 DOF). Translational Joint (1 DOF). Cylindrical Joint (2 DOF). Spherical Joint (3 DOF). Planar Joint (3 DOF). CS 490.006/582.001 Kinematic Linkages Page 36. Articulated Hierarchy. CS 490.006/582.001 Kinematic Linkages Page 37. Tree-Based Hierarchical Model.

E N D
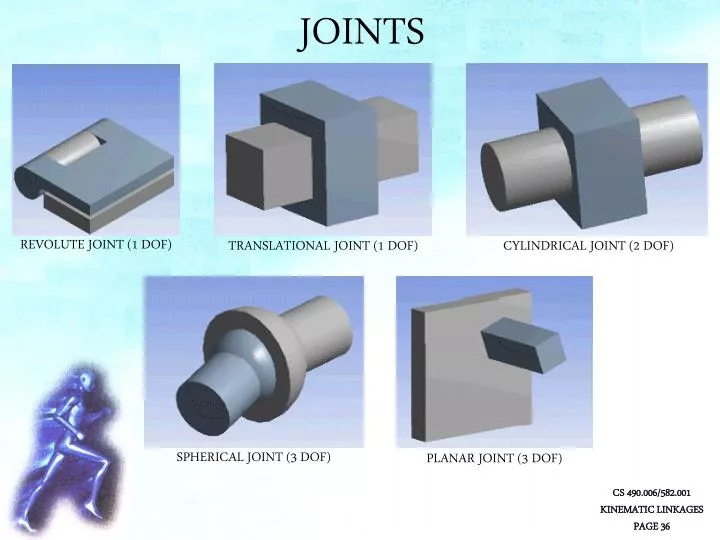
Joints Revolute Joint (1 DOF) Translational Joint (1 DOF) Cylindrical Joint (2 DOF) Spherical Joint (3 DOF) Planar Joint (3 DOF) CS 490.006/582.001 Kinematic Linkages Page 36
Articulated Hierarchy CS 490.006/582.001 Kinematic Linkages Page 37
Tree-Based Hierarchical Model CS 490.006/582.001 Kinematic Linkages Page 38
Skeleton Hierarchy CS 490.006/582.001 Kinematic Linkages Page 39
Kinematics Inverse Kinematics The modeler moves a handle to pose the entire joint chain Forward Kinematics The modeler rotates or moves individual joints to pose and animate the joint chains CS 490.006/582.001 Kinematic Linkages Page 40
Forward Kinematics CS 490.006/582.001 Kinematic Linkages Page 41
Inverse Kinematics CS 490.006/582.001 Kinematic Linkages Page 42
Case study: Two-Link Arm L2 y 2 L1 4 1 3 x CS 490.006/582.001 Kinematic Linkages Page 43
Using the Jacobian Matrix Effector Position L2 y 2 L1 y 1 x x Effector Destination CS 490.006/582.001 Kinematic Linkages Page 44