Download
1 / 23
230 likes | 365 Views
Multiple Models Adaptive Decoupling Controller Using Dimension-By-Dimension Technology. Xin WANG wangxin26@sjtu.edu.cn Center of Electrical & Electronic Technology Shanghai Jiao Tong University. Outline. 1. Introduction 2. Description of the system

E N D
Multiple Models Adaptive Decoupling Controller Using Dimension-By-Dimension Technology Xin WANG wangxin26@sjtu.edu.cn Center of Electrical & Electronic Technology Shanghai Jiao Tong University
Outline 1.Introduction 2. Description of the system 3. Multiple Models Adaptive Decoupling Controller with DBD Technology 4. Global convergence analysis 5. Application 6. Conclusions
1. Introduction • Multiple models adaptive control • Indirect MMAC • Problems • Our research work
MMAC • Direct MMAC • Newcastle University Prof. Fu • switching sequence is predetermined • Indirect MMAC • Yale University Prof. Narendra • switching is determined only by switching index • Weighting MMAC • France Prof. Binder • input is weighted
Indirect MMAC • Multiple adaptive models • Multiple fixed models • Multiple fixed models + 1 free-running adaptive model • Multiple fixed models + 1 free-running adaptive model + 1 re-initialized adaptive model
Problems • Single input single output system • Indirect adaptive algorithm • Too many models • 4 parameters, 100models each parameter • 1004 = 100,000,000 models
Our Research Work • Multivariable system • feedforward decoupling control • Nonminimum phase system • Direct adaptive algorithm • reduce computations • Global convergence analysis
2 Description of System • Linear time-varying system
Description of System • Assumptions • infrequent large jumps parameters. • minimum phase system • DARMA model
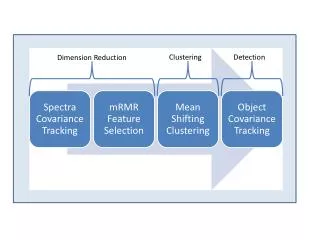
3 DBD MMADC Design • DBD Principle of MMADC • Foundation of system models • DBD MMADC
DBD Principle • According to the prior information, determine the interval where the first dimension parameter changes; • Partition the above interval into n1 sub-intervals, then choose a center from each sub-interval and compose them into n1 fixed models of the first dimension parameter. • According to the switching index, choose the optimal value of the first dimension parameter whereas the other parameters are kept constant. • Repeat the above procedures until the optimal model of the last dimension, i.e. hth dimension, is chosen out.
Fixed System Models • System parameter subsets • divide the system parameter set into m subsets • satisfy • system parameter set is covered by m subsets
Fixed System Models • Fixed system models • select the model • satisfy • system parameter subset is covered by the models and their neighbors
DBD MMADC • DBD fixed models • cover the system changing area • one free-running adaptive model (m+1) • guarantee the stability • one reinitialized adaptive model (m+2) • improve the transient response
Switching • Switching index • Model selection
Reinitialized Adaptive Model • j ≠m+2 • reinitialize the initial value to the adaptive model • . • j = m+2 • reinitialized adaptive model is selected as the optimal model • Using the same recursive estimation algorithm as the free-running adaptive model
Controller Design • Performance index • Diophantine equation • Controller
4 Global Convergence • Theorem Subject to the assumptions, if the algorithm is applied to the system • are bounded; • .
5 Simulation • System • t=50, B0 jumps • t=150, w changes
5 Simulation 2401 models MMADC 28 models DBD MMADC 2400 models DBD MMADC
6 Conclusions • Nonminimum Phase System • The number of fixed models Reduction • Switching disturbance • Nonlinear system