Download
1 / 52
580 likes | 906 Views
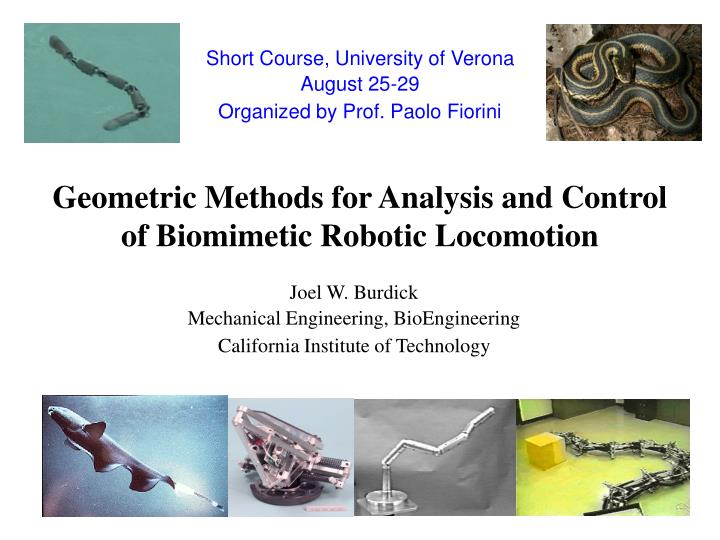
Geometric Methods for Analysis and Control of Biomimetic Robotic Locomotion. Short Course, University of Verona August 25-29 Organized by Prof. Paolo Fiorini. Joel W. Burdick Mechanical Engineering, BioEngineering California Institute of Technology. Goal of Introductory Lecture.

E N D
Geometric Methods for Analysis and Control of Biomimetic Robotic Locomotion Short Course, University of Verona August 25-29 Organized by Prof. Paolo Fiorini Joel W. Burdick Mechanical Engineering, BioEngineering California Institute of Technology
Goal of Introductory Lecture • Biomimetic Locomotion: what is it, why study it? • Examples (videos…) • Key Issues • Key Ideas (without much math) • Motivate organization of remaining lectures Have some fun!
Movement is a key requirement for many autonomous systems • Traditional Design Approach • Thrust device(s) • Steering device(s) • Limitations: • Inappropriate for some uses/terrains • Often not maneuverable • at low speeds, • in “tight” spaces • complex environments • Inappropriate design Global Hawk Bomb/Swat Robot
Look to Nature! Biomimetic Locomotion:robotic movement that mimics natural patterns of movement. • Advantages • Move by shape deformation • Nature gives clues • Diversity of regimes • Disadvantages • Unknown models/principles • Complex dynamics/control • Diversity of models
Hyper-Redundant Robotic Systems(Chrikjian and Burdick, 1988-1994) • “snake-like” robots • niche applications: inspection, medicine, … • algorithms for coordinating large # DOF
Robotic Gastroscope(System overview) Analogous to segmented worm • Grippers provide traction • Extensors cause displacement • Many possible gaits Generation 5 prototype Testing robot in live pig intestine Gait
Limitations in Biomimetic Locomotion Research • Current approaches: • morphology restricted. • unpredictive (not rigorous) • robustness? • scaling? • Cost effective and robust biomimetic locomotion will require a more universal approach
Non-Traditional Biomimetic Locomotors Limitations are much more significant for “non-traditional” biomimetic systems
Home/Personal Robots • Remote presence in your home • eldercare • simple security • personal messages • plaything, playmate • ……
Control Issues q2 Controllability:does there exist an control action that takes vehicle from q1 to q2 ? Trajectory Planning (open loop control):compute control inputs, u, taking vehicle from q1 to q2 q1 Feedback control: find u(q) to stabilize robot to a point or trajectory in presence of disturbances • Need a model! • Compatible with geometric nonlinear control theory • Doesn’t need to capture all effects accurately
The “Snakeboard”(a poster-boy for biomimetic locomotion!) Controllable: • move in any direction? Trajectory generation: • how to wiggle from A to B? Control: • get back on track
Carangiform/Thunniform swimming(R. Mason, K. Morgansen, S. Kelly, R. Murray) Some of the most impressive aquatic swimmers Involves complex vorticity generation & control
Fish Fin Motor Project Problem: Personal water-craft manufacturers are facing an environmental regulation crisis. Solution?: move away from motor/prop paradigm. Long term agenda: Sensor-guided, fin-assisted control for personal watercraft
Minimalist Legged Locomotion(Goodwine, Kajita, Vela) • Characteristics: • 2 DOF planar legs • capable of general motion
The Ideal State Properties of a comprehensive engineering framework • not constrained to a given morphology • doesn’t depend on #DOF • handles diverse environments • can be implemented in software tools • rigorous enough to predict and enable robust performance
Investigative Life Cycle (hard problems) Typical birth and maturation cycle End result: new set of tools/products
How to we get there? • Systematic Mathematical Study • Look at similarities, not differences • Take a control theoretic perspective • develop canonical forms of equations of motion • develop a “control theory’ for these equation • derive trajectory generation from theory • derive feedback algorithms from theory • Not done in isolation (larger context for theory)
Parallel Developments • Biomechanical Modeling ½ Theoretical Mechanics • Geometrical picture of non-holonomic systems is recent advance. • Geometrical Mechanics picture of fluids still emerging. • Biomimetic Locomotion ½ Nonlinear Control • Nonlinear feedback control of under-actuated nonlinear systems is in its infancy. • Feedback control of discontinuous systems?
Where are we? • “Canonical” dynamical equations: • good progress toward “unifying” many locomotion classes. Fluid mechanical & dynamic legged systems still require significant work. • Controllability theory: • Many cases worked out • Uniform trajectory generation algorithms: • Probably, a paradigm for “kinematic” systems has emerged • Uniform feedback control techniques: • Probably. Averaging paradigms seem promising • Some systems (i.e. fluid systems) will require substantially new results. Bloch, Bullo, Burdick, Goodwine, Kelly, Koiller, Krishnaprasad, Leonard, Marsden, Mason, Morgansen,Murray,Ostrowski, Radford, Tsakiris, Vela, ….
A Brief & Incomplete History • Early efforts (modelling & mechanics) • Wilczek & Shapere (‘89), Koiller (~‘92): micro-swimmers • Krishnaprasad & Tsakris (~’94), Kelly & Murray (‘95+): robotics • Lewis, Ostrowski, Burdick, Murray (‘94): “the snakeboard” • Bloch, Krishnaprasad, Marsden, Murray (‘96): • nonholonomic systems with symmetry • Expansion of basic paradigm, analysis of control issues, …. • Bloch, Bullo, Burdick, Goodwine, Kelly, Krishnaprasad, Leonard, Marsden, Mason, Murray, Ostrowski, Radford, Tsakiris, Zefran, Zenkov…. • Kelly & Murray (‘95), Ostrowski & Burdick (‘97): controllability • Zenkov, Bloch, & Marsden (‘97): stability • Goodwine & Burdick (‘97-’01): legged locomotion • Kelly & Murray(’96-’98): simplified fluid locomotion
Principles of Biomimetic Locomotion Generated by coupling of periodic body deformations to external constraints. Reaction forces generate net movement Non-holonomic constraints Creeping undulatory sidewinding Piecewise holonomic constraints Viscous constraints Fluid Mechanical constraints
r1 (conventional) Lagrangian Mechanics = System Lagrangian (kinetic – potential energy) velocity constraints
Eliminate l Example: “Hilare” robot position shape Velocity Constraints Decoupling! Kinematic constraints determine motion!
Example: the “Snakeboard” Simplified Snakeboard Geometry Velocity Constraints The kinematic constraints alone do not determine motion
r1 Basic Geometric Principles It is the interaction between shape change and constraints that generates motion position shape r2 Shape Space Lie Group The Configuration Space of all biomimetic locomotors is a (trivial) principal fiber bundle
r1 Basic Geometric Principles position r2 shape Q: when body wiggles, how far does it displace? A:relation between shape change and robot displacement is described by the geometric phase of the constraint connection one-form Hilare Snakeboard
r1 position shape Shape Space Lie Group Symmetries r2 Left Action of G on Q (e.g., frame change) Lagrangian (and constraints) invariant w.r.t. action Symmetries conservation laws (Noether) (not necessarily in presence of constraints).
Symmetries & Non-holonomic Constraints(Bloch, Krishnaprasad, Marsden, Murray ‘96) Snakeboard Hilare Needed for control analysis
Extension to Other Biomimetic Propulsors • Highly Viscous Constraints(Slug-like): Kelly & Murray 1995 • Kinematics Snakes: Ostrowski & Burdick 1996 • Legged Systems (quasi-static): Goodwine & Burdick 97-00 • Fluid Systems • C-space: Q=SE(3) x M x (fluid state) • incompressible fluid: Lie Group • SE(m) symmetry • symmetries of • fluid/body constraints • flow at domain boundaries
Propulsion in Idealized Fluids(a robot amoeba?) • Microscopic (real) amoeba: low Reynold’s no. (creeping) flow • Macroscopic (robot) amoeba: well modelled by potential flow. Fluid potential for surface with dk deformation modes Subject to boundary conditions
Due to SE(m)-invariance connection where Example:
Too Slow! (max speed ~e2) Trajectory Generation
Control/Controllability Nonlinear affine control systems have the form Control vector fields drift Let The system is accessible if: (driftless: STLC Accessible)
Locomotive Gaits A “locomotive gait” is a cyclic pattern of shape change resulting in net vehicle movement. drive rotate Slide (parallel park) Closely related to geometric phase and controllability Kinematic case:Kelly & Murray 95 General Case:Ostrowski & Burdick 96
Accessible Motions u1, u2 y x Control affine model
Time Periodicity/Averaging Time periodicity, like a symmetry, can be reduced Original Function: F(x,t)=F(x,t+T) Averaged Function: F(x,t)=s0T F(x,t) • Biomimetic Locomotors use gaits (periodic controls) • Net behavior determined by averaged system • Design controls for averaged system, but still can prove properties!
Feedback control results Feedback Open Loop Simulation Experiment
Legged Locomotion (and grasping) • Want: • general methods that span morphologies • compatible with geometric framework • handles “underactuated” systems • Approach • stratified configuration spaces • stratified control theory
Stratified Configuration Spaces Definition: A set X is regularlystratifiedif it can be decomposed into a finite union of disjoint smooth manifolds, called strata(satisfying the Whitney condition). S0 denotes the c-space Highest codim strata is “bottom strata”
Controllability Equations of Motion on SI are smooth: Discontinuities occur across strata Gait: ordered sequence of strata: • Gait Distribution: Let • If then • Else, if then Proposition: If dim(Dn) = dim(TxSB), the system is small time locally gait controllable at x.
Minimalist Hexapod Example (Tripod Gait) Straight trajectory
Summary • Common Features: • Principal Bundle c-space • Symmetries • Constraints • Periodic motions • A Biomimetic control theory should synthesize appropriate mathematical tool, with the goal of simplicity, intuition, but also provable robustness.