Download
1 / 29
460 likes | 1.1k Views
Robotics Lab 3 Robotic Locomotion. Eleanor Roosevelt High School Chin-Sung Lin. What is Locomotion?. Robotic locomotion is the study of how to design robot appendages and control mechanisms to allow robots to move fluidly and efficiently. Types of Locomotion. Wheeled. Tank- Treaded.

E N D
Robotics Lab 3Robotic Locomotion Eleanor Roosevelt High School Chin-Sung Lin
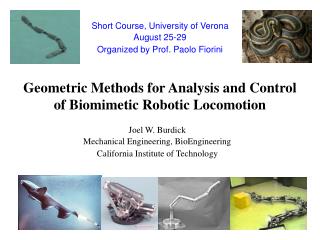
What is Locomotion? Robotic locomotion is the study of how to design robot appendages and control mechanisms to allow robots to move fluidly and efficiently
Types of Locomotion Wheeled Tank- Treaded Rolling Legged Robotic Locomotion Crawling Hopping Others Flying Snaking Swimming
Wheeled Locomotion Single Double Others Bicycle Wheeled Locomotion Four Tricycle Omni
Single-Wheeled Locomotion Single Wheeled Robot from Iran
Double-Wheeled Locomotion Double Wheeled Robot by Uppsala University, Sweden
Bicycle Locomotion Ghostrider by UC Berkeley
Tricycle Locomotion Tricycle by SMU
Omni-Directional Locomotion Rovio by WowWee
Four-Wheeled Locomotion Stanley by Stanford University
Other Wheeled Locomotion Crusher by CMU
Tank-Treaded Locomotion Dr. Robot Jaguar Tracked Mobile Robot
Legged Locomotion Single Bipedal Legged Others Tri-pedal Hexapod Quadru- pedal
Single-Legged Locomotion iHop Self-Balancing Pogo Stick
Bipedal Locomotion Petman by Boston Dynamics Asimo by Honda
Tripedal Locomotion STriDER 2.0 by Virginia Tech
Quadrupedal Locomotion BigDog by Boston Dynamics
Hexapod Locomotion A-Pod: An Ant Inspired Hexapod Robot
Other Legged Locomotion Octopus by UBC
Hopping Locomotion Sand Flea Jumping Robot by Boston Dynamics
Flying Locomotion Flying Bird UAV
UAV Locomotion Predator UAV by General Atomics Aeronautical Systems
Bird Locomotion SmartBird by Festo
Swimming Locomotion Robotic Fish by University of Essex AquaPengiun by Festo
Snaking Locomotion S5 Snake Robot
Crawling Locomotion SoftWorm by Case Western Reserve University Earthworm Soft Robot by MIT
Rolling Locomotion Groundbot by Rotundus
Other Locomotion New Robot by YOU
Lab 3 Robotic Locomotion Assignment: • Design, build, and demo a robot with a type of locomotion chosen or created by your group • Investigate the locomotion theory of your robot • Present and report your findings • Demo & Presentation: Thursday, 10/18/2012 • Lab Report: Wednesday, 10/16/2012