Download
1 / 14
140 likes | 379 Views
Implementation of Solenoids for Cylindrical or Spherical Robotic Locomotion . Presenters . Justin Moses. Joel Lawrence. Spherical Robots. Sphero tm ball robot controlled by iPhone/ iPad Commercially available. Typical Spherical Robots. Movement is controlled by internal mechanisms

E N D
Implementation of Solenoids for Cylindrical or Spherical Robotic Locomotion
Presenters Justin Moses Joel Lawrence
Spherical Robots • Spherotm ball robot controlled by iPhone/iPad • Commercially available
Typical Spherical Robots • Movement is controlled by internal mechanisms • Counter-pendulum • Gyroscope • Internal rotor • Omnidirectional • Can traverse many types of terrain • Have no top – bottom orientations • Sealed off from the environment
Limitations of Spherical Robots • Cannot stop quickly • Cannot overcome obstacles greater than the radius of the sphere • Hard to have a zero-turn radius (hard to turn about the z axis)
Solution Use solenoids!
Why Solenoids? • Allow for greater control of movement • Robot can stop sooner • Robot has the potential to jump to overcome obstacles
Disadvantages • Weight • Cost • Open to the environment • High power consumption
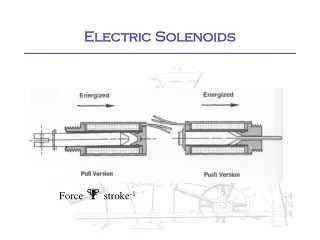
Solenoids and Implementation • Solenoids use inductance to control a plunger • Can be push, pull, or push-pull • Usually have springs to automatically retract or extend after turned off
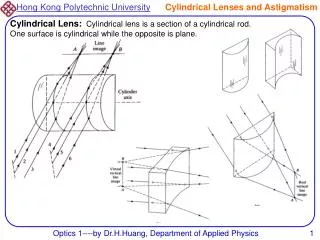
Spherical Design • Uses solenoids with plungers extending from the shell • Only two rows to show proof of concept • Built inside a hamster ball
Simplified Design • Use a cylinder instead of a sphere • Use the body of a pen to stop the plungers • Everything else stays the same
Controlling the Robot • TI MSP430 as the microcontroller • Either a TIP31 or a MJE3055 BJT • 7805 5v rectifier IC • Standard 120 Vac to 12 Vdc wall plug • Coded using Code Composer Studio
Testing • Used LEDs to indicate which solenoid should be activated • Original 2N3904 transistors failed