Download
1 / 19
210 likes | 851 Views
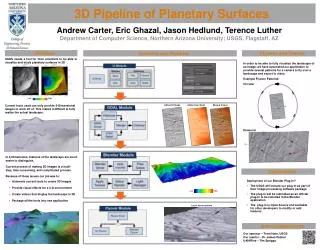
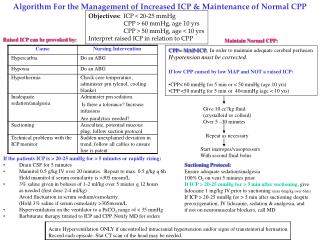
A Method for Registration of 3D Surfaces ICP Algorithm Erhan Avinal Introduction Building 3D models of real world objects Data capture using range camera Registration Data merge Registration - Goal To transform sets of surface measurements into a common coordinate system

E N D
A Method for Registration of 3D SurfacesICP Algorithm Erhan Avinal
Introduction • Building 3D models of real world objects • Data capture using range camera • Registration • Data merge
Registration - Goal • To transform sets of surface measurements into a common coordinate system • A model shape and a data shape
Registration • If we know correct correspondences, we can find correct translation and rotation
Rotation and translation Registration • Issue : Finding corresponding points • ICP : Assume closest points correspond to each other, compute the best transform
ICP Algorithm Can be used with
Distance • Euclidian distances • Point to point set • Point to line segment • Point to triangle • Point to parametric entity • Point to implicit entity
Algorithm • Point Set P with Np points, model shape X • Iterate until convergence • Compute closest points • Squared Euclidian distances • Compute registration (rotation and translation) • Apply the registration • New point set
Other Issues • Color matching • Sharp, 2002 • Godin, 1995 • Johnson, 1997 • Orientation • Godin 2001 • Schutz 1998
Other Issues • Weighting • Important nodes • Initial point selection • Uniform sampling • Random • Select in regions of high curvature • k-d trees to find closest points
Conclusions • ICP can register a data shape to a model shape • Independent of shape representation • Does not require preprocessing of 3D data • A good initial estimate of transformation is required • High computation cost
Future Work • Computational speedup • Parallel testing • Allow deformations
References • Original Paper: • P.J. Besl, N.D. McKay,A Method of Registration of 3D Shapes, 1992 • T. Jost, Fast Geometric Matching for Shape Registration, 2002 • S.M. Rusinkiewicz, Real time Acquisition and Rendering of Large 3D Models, 2001 • http://www.ee.surrey.ac.uk/Research/VSSP/3DVision/model_building/model.html