Download
1 / 14
180 likes | 510 Views
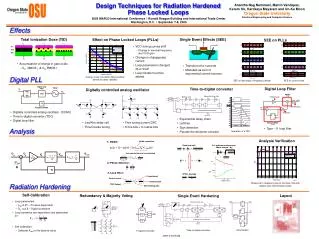
Phase Locked Loops. VCO. Ref. LO. PFD. Loop Filter. f LO = f ref *N/M. 1/N. Once locked, f_ref = f_div But f_div = f_LO / N Therefor, f_LO = N * f_ref. Smallest change in f_LO is f_ref. For high tuning resolution, need very small f_ref.

E N D
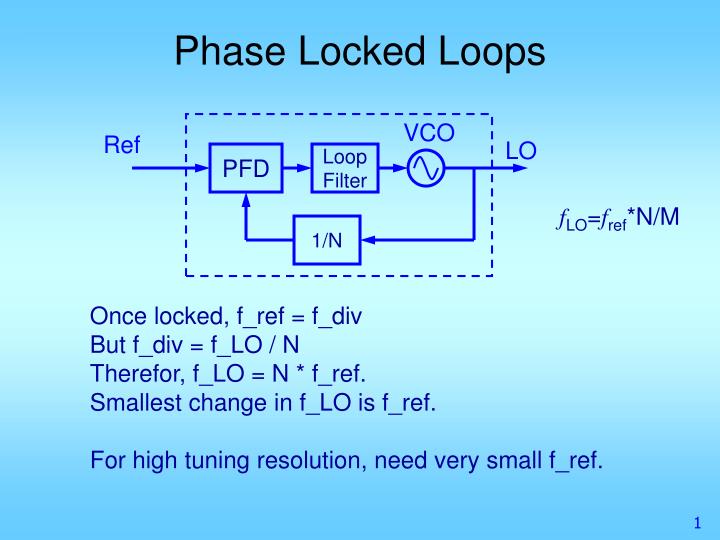
Phase Locked Loops VCO Ref LO PFD Loop Filter fLO=fref*N/M 1/N Once locked, f_ref = f_div But f_div = f_LO / N Therefor, f_LO = N * f_ref. Smallest change in f_LO is f_ref. For high tuning resolution, need very small f_ref.
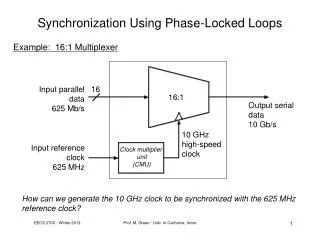
Conflict between freq resolution and PLL bandwidth / settling time • Since PFD is controlled by f_ref, hence f_sampling = f_ref • For stability and transfer characteristics, need f_ref to be 10’s of times of PLL bandwidth • Hence, f_BW ~ 0.01 to 0.1 * f_ref • PLL settling time = k * 1/_BW
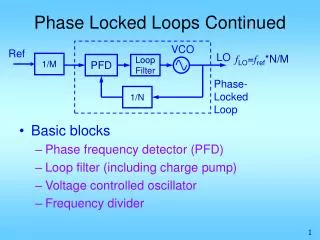
Increasing freq resolution and BW VCO Ref LO fLO=fref*N/M 1/M PFD Loop Filter Phase-Locked Loop 1/N After lock, PFD input signals have the same freq. Hence, f_ref / M = f_LO / N Therefor, f_LO = f_ref *N/M Freq resolution: f_ref * (N1/M1 –N2/M2) PFD sampling freq: f_sampling = f_ref / M PLL bandwidth: 0.02 to 0.05 * f_ref / M
Phase Locked Loops VCO Ref LO PFD Loop Filter 1/N N dither N1 N = N1 + dither In lock, f_LO = average(N) * f_ref. Smallest change in f_LO can be very fine.
Phase Locked Loops VCO Ref LO PFD Loop Filter dither 1/N N_frac Carry out Accumulator Smallest increments in N_frac sets freq resolution. Problem: periodic errors.
For N = 4.25, user integer 4 and N_frac = 0.25 In every 4 cycles, div by 4 three times and div by 5 once When carry signal is generated, “swallow” one VCO cycle Notice the periodic error signal that feed into fileter
Accumulator Operation • Carry out bit is asserted when accumulator residue reaches or surpasses its full scale value • Accumulator residue corresponds to instantaneous phase error • Increments by the fractional value input into the accumulator
Phase Locked Loops VCO Ref LO PFD Loop Filter dither 1/N N_sd Sigma-Delta modulator N = N or N+1 Riley US Patent 4965531, 1989; JSSC ‘93MASH Noise shaping. Removes periodic tones.
The amount of noise depends on PLL band width. Smaller BW lower noise
Divider • At high frequency, divider block is challenging to design • It consumes a lot of power • Typically implemented using several stages • Can have each stage operating at gradually lower freq to save power
Divide-by-2 Circuit • Achieves frequency division by clocking two latches (i.e., a register) in negative feedback • Latches may be implemented in various ways according to speed/power requirements
Advantages • Reasonably fast, compact size • No static power dissipation, differential clock not required • Disadvantages • Slowed down by stacked PMOS, signals goes through three gates per cycle • Requires full swing input clock signal
Very fast due to small swing and absence of PMOS devices • Additional speedup can be obtained by using inductors • High power, large area • Differential signals required, Biasing sources required
Divide by 2 or 3 • Normal mode of operation: CON*= 0 ⇒Y = 0 • Register B acts as divide-by-2 circuit • Divide-by-3 operation: CON*= 1 ⇒Y = 1 • RegB remains high for an extra cycle • Causes Y to be set back to 0 ⇒RegB toggles again • CON* must be set back to 0 before RegB toggles to prevent extra pulses from being swallowed