Download
1 / 28
280 likes | 402 Views
Toby Walsh National ICT Australia and University of New South Wales www.cse.unsw.edu.au/~tw Joint work with Claude-Guy Quimper To be presented at CP06. Global Grammar Constraints . Global grammar constraints. Often easy to specify a global constraint ALLDIFFERENT([X1,..Xn]) iff

E N D
Toby Walsh National ICT Australia and University of New South Wales www.cse.unsw.edu.au/~tw Joint work with Claude-Guy Quimper To be presented at CP06 Global Grammar Constraints
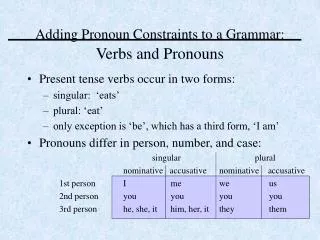
Global grammar constraints • Often easy to specify a global constraint • ALLDIFFERENT([X1,..Xn]) iff Xi=/=Xj for i<j • Difficult to build an efficient and effective propagator • Especially if we want global reasoning
Global grammar constraints • Promising direction initiated by Beldiceanu, Carlsson, Pesant and Petit is to specify constraints via automata/grammar • Sequence of variables = string in some formal language • Satisfying assignment = string accepted by the grammar/automata
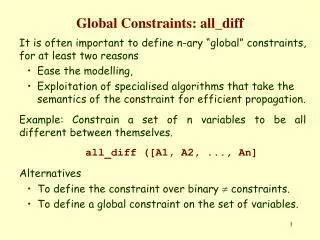
REGULAR constraint • REGULAR(A,[X1,..Xn]) holds iff • X1 .. Xn is a string accepted by the deterministic finite automaton A • Proposed by Pesant at CP 2004 • GAC algorithm using dynamic programming • However, DP is not needed since simple ternary encoding is just as efficient and effective • Encoding similar to that used by Beldiceanu et al for their automata with counters
REGULAR constraint • Deterministic finite automaton (DFA) • <Q,Sigma,T,q0,F> • Q is finite set of states • Sigma is alphabet (from which strings formed) • T is transition function: Q x Sigma -> Q • q0 is starting state • F subseteq Q are accepting states • DFAs accept precisely regular languages
REGULAR constraint • Many global constraints are instances of REGULAR • AMONG • CONTIGUITY • LEX • PRECEDENCE • STRETCH • .. • Domain consistency can be enforced in O(ndQ) time using dynamic programming
REGULAR constraint • REGULAR constraint can be encoded into ternary constraints • Introduce Qi+1 • state of the DFA after the ith transition • Then post sequence of constraints • C(Xi,Qi,Qi+1) iff DFA goes from state Qi to Qi+1 on symbol Xi
REGULAR constraint • REGULAR constraint can be encoded into ternary constraints • Constraint graph is Berge-acyclic • Constraints only overlap on one variable • Enforcing GAC on ternary constraints achieves GAC on REGULAR in O(ndQ) time
REGULAR constraint • REGULAR constraint can be encoded into ternary constraints • Constraint graph is Berge-acyclic • Constraints only overlap on one variable • Enforcing GAC on ternary constraints achieves GAC on REGULAR in O(ndQ) time • Encoding provides access to states of automata • Can be useful for expressing problems • E.g. minimizing number of times we are in a particular state
REGULAR constraint • STRETCH([X1,..Xn]) holds iff • Any stretch of consecutive values is between shortest(v) and longest(v) length • Any change (v1,v2) is in some permitted set, P • For example, you can only have 3 consecutive night shifts and a night shift must be followed by a day off
REGULAR constraint • STRETCH([X1,..Xn]) holds iff • Any stretch of consecutive values is between shortest(v) and longest(v) length • Any change (v1,v2) is in some permitted set, P • DFA • Qi is <last value, length of current stretch> • Q0= <dummy,0> • T(<a,q>,a)=<a,q+1> if q+1<=longest(a) • T(<a,q>,b)=<b,1> if (a,b) in P and q>=shortest(a) • All states are accepting
NFA constraint • Automaton does not need to be deterministic • Non-deterministic finite automaton (NFA) still only accept regular languages • But may require exponentially fewer states • Important as O(ndQ) running time for propagator • E.g. 0* (1|2)^k 2 (1|2)* 2 (1|2)^k 0* • Where 0=closed, 1=production, 2=maintenance • Can use the same ternary encoding
Soft REGULAR constraint • May wish to be “near” to a regular string • Near could be • Hamming distance • Edit distance • SoftREGULAR(A,[X1,..Xn],N) holds iff • X1..Xn is at distance N from a string accepted by the finite automaton A • Can encode this into a sequence of 5-ary constraints
Soft REGULAR constraint • SoftREGULAR(A,[X1,..Xn],N) • Consider Hamming distance (edit distance similar though a little more complex) • Qi+1 is state of automaton after the ith transition • Di+1 is Hamming distance up to the ith variable • Post sequence of constraints • C(Xi,Qi,Qi+1,Di,Di+1) where • Di+1=Di if T(Xi,Qi)=Qi+1 else Di+1=1+Di
Soft REGULAR constraint • SoftREGULAR(A,[X1,..Xn],N) • To propagate • Dynamic programming • Pass support along sequence • Just post the 5-ary constraints • Accept less than GAC • Tuple up the variables
Cyclic forms of REGULAR • REGULAR+(A,[X1,..,Xn]) • X1 .. XnX1 is accepted by A • Can convert into REGULAR by increasing states by factor of d where d is number of initial symbols • qi => (qi,initial value) • T(qi,a)=qj => T((qi,b),a)=(qj,b) • Thereby pass along value taken by X1 so it can be checked on last transition
Cyclic forms of REGULAR • REGULARo(A,[X1,..,Xn]) • Xi .. X1+(i+n-1)mod n is accepted by A for each 1<=i<=n • Can decompose into n instances of the REGULAR constraint • However, this hinders propagation • Suppose A accepts just alternating sequences of 0 and 1 • Xi in {0,1} and REGULARo(A,[X1,X2.X3]) • Unfortunately enforcing GAC on REGULARo is NP-hard
Cyclic forms of REGULAR • REGULARo(A,[X1,..,Xn]) • Reduction from Hamiltonian cycle • Consider polynomial sized automaton A1 that accepts any sequence in which the 1st character is never repeated • Consider polynomial sized automaton A2 that accepts any walk in a graph • T(a,b)=b iff (a,b) in edges of graph • Consider polynomial sized automaton A1 intersect A2 • This accepts only those strings corresponding to Hamiltonian cycles
Other generalizations of REGULAR • REGULAR FIX(A,[X1,..Xn],[B1,..Bm]) iff • REGULAR(A,[X1,..Xn]) and Bi=1 iff exists j. Xj=I • Certain values must occur within the sequence • For example, there must be a maintenance shift • Unfortunately NP-hard to enforce GAC on this
Other generalizations of REGULAR • REGULAR FIX(A,[X1,..Xn],[B1,..Bm]) • Simple reduction from Hamiltonian path • Automaton A accepts any walk on a graph • n=m and Bi=1 for all i
Chomsky hierarchy • Regular languages • Context-free languages • Context-sensitive languages • ..
Chomsky hierarchy • Regular languages • GAC propagator in O(ndQ) time • Conext-free languages • GAC propagator in O(n^3) time and O(n^2) space • Asymptotically optimal as same as parsing! • Conext-sensitive languages • Checking if a string is in the language PSPACE-complete • Undecidable to know if empty string in grammar and thus to detect domain wipeout and enforce GAC!
Context-free grammars • Possible applications • Hierarchy configuration • Bioinformatics • Natual language parsing • … • CFG(G,[X1,…Xn]) holds iff • X1 .. Xn is a string accepted by the context free grammar G
Context-free grammars • CFG(G,[X1,…Xn]) • Consider a block stacking example • S -> NP | P | PN | NPN • N -> n | nN • P -> aa | bb | aPa | bPb • These rules give n* w rev(w) n* where w is (a|b)* • Not expressible using a regular language • Chomsky normal form • Non-terminal -> Terminal • Non-terminal -> Non-terminal Non-terminal
CFG propagator • Adapt CYK parser • Works on Chomsky normal form • Non-terminal -> Terminal • Non-terminal -> Non-terminal Non-terminal • Using dynamic programming to compute supports • Bottom up • Enforces GAC in Theta(n^3) time Simultaneously and independently proposed by Sellmannn [CP06]
CFG propagator • Adapt Earley chart parser • Carry support information • Works on grammar in any form • More top down • Better on tightly restricted grammars • Enforces GAC in O(n^3) time • Best case is better as not Theta(n^3)
Conclusions • Global grammar constraints • Specify wide range of global constraints • Provide efficient and effective propagators automatically • Nice marriage of formal language theory and constraint programming!