Download
1 / 6
80 likes | 278 Views
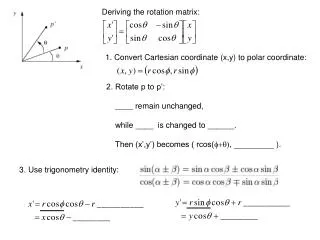
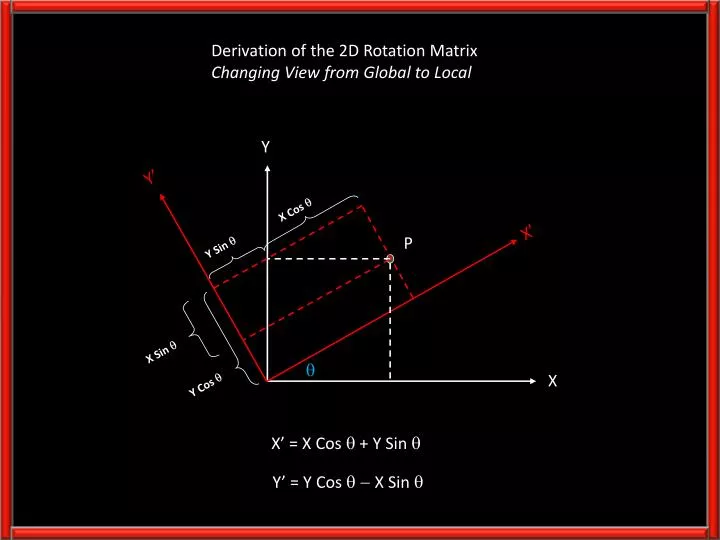
Y. Y’. X Cos q. Y Sin q. X’. P. X Sin q. Y Cos q. q. X. Derivation of the 2D Rotation Matrix Changing View from Global to Local. X’ = X Cos q + Y Sin q. Y’ = Y Cos q - X Sin q. Y. Y’. X’. Y’ Cos q. P. X’ Sin q. X’ Cos q. q. Y’ Sin q. X.

E N D
Y Y’ X Cos q Y Sin q X’ P X Sin q Y Cos q q X Derivation of the 2D Rotation Matrix Changing View from Global to Local X’ = X Cos q + Y Sin q Y’ = Y Cos q - X Sin q
Y Y’ X’ Y’ Cos q P X’ Sin q X’ Cos q q Y’ Sin q X Derivation of the 2D Rotation Matrix Changing View from Local to Global X = X’ Cos q - Y’ Sin q Y = X’ Sin q + Y’ Cos q
X’ Cos Sin -Sin Cos X = Y’ Y X Cos -Sin Sin Cos X’ = Y Y’ Conversion of Equations to Matrix Form From Global to Local: X’ = X Cos q + Y Sin q Y’ = Y Cos q - X Sin q From Local to Global: X = X’ Cos q - Y’ Sin q Y = X’ Sin q + Y’ Cos q
Derivation of the 3D Rotation Matrix Y Y’ X’ P qz X X’ = X Cos q + Y Sin q Z’ Z Y’ = Y Cos q - X Sin q Z’ = Z
Z axis rotations From Global to Local: X’ = X Cos qz + Y Sin qz Y’ = Y Cos qz- X Sin qz Z’ = Z From Local to Global: X = X’ Cos qz - Y’ Sin qz Y = X’ Sin qz + Y’ Cos qz Z = Z’