Download
1 / 7
70 likes | 506 Views
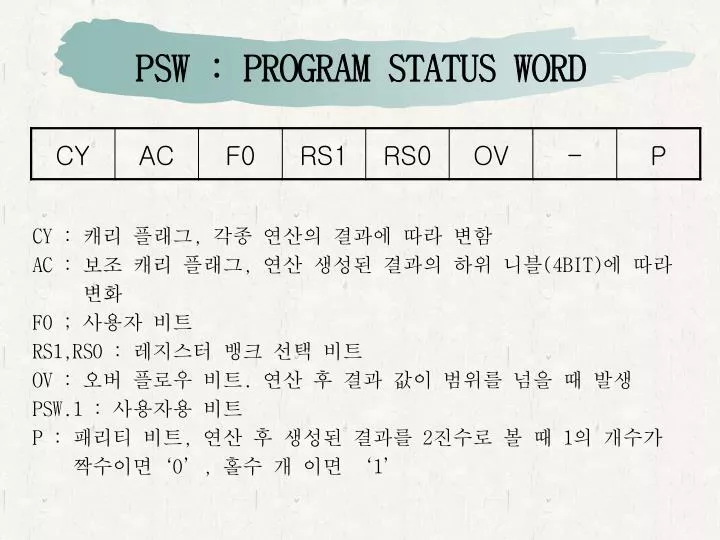
PSW : PROGRAM STATUS WORD. CY : 캐리 플래그 , 각종 연산의 결과에 따라 변함 AC : 보조 캐리 플래그 , 연산 생성된 결과의 하위 니블 (4BIT) 에 따라 변화 F0 ; 사용자 비트 RS1,RS0 : 레지스터 뱅크 선택 비트 OV : 오버 플로우 비트 . 연산 후 결과 값이 범위를 넘을 때 발생 PSW.1 : 사용자용 비트 P : 패리티 비트 , 연산 후 생성된 결과를 2 진수로 볼 때 1 의 개수가

E N D
PSW : PROGRAM STATUS WORD CY : 캐리 플래그, 각종 연산의 결과에 따라 변함 AC : 보조 캐리 플래그, 연산 생성된 결과의 하위 니블(4BIT)에 따라 변화 F0 ; 사용자 비트 RS1,RS0 : 레지스터 뱅크 선택 비트 OV : 오버 플로우 비트. 연산 후 결과 값이 범위를 넘을 때 발생 PSW.1 : 사용자용 비트 P : 패리티 비트, 연산 후 생성된 결과를 2진수로 볼 때 1의 개수가 짝수이면‘0’, 홀수 개 이면 ‘1’
PCON : POWER CONTROL REGISTER SMOD : 항상 1로 설정. 보오 레이트 설정 시에 사용된다. • : 예약된 비트 GF1,GF0 : 일반 목적으로 사용 가능한 플래그. 비트별로 제어가 불가능하기 때문에 거의 사용하지 않는다. PD : Power Down Bit. 1로 설정하면 CPU가 파워 다운 모드로 들어간다. IDL : Idle Mode Bit. 1로 설정하면 CPU가 아이들 모드로 들어간다. 동시에 PD와 함께 1이 되면 PD가 우선한다.
IE : INTERRUPT ENABLE REGISTER EA : 0이면 전체 인터럽트가 금지, 1이면 각각의 인터럽트 인에이블 비트에 의존한다. - : 예약된 비트 ET2 : Timer 2 overflow or capture interrupt ES : Serial interrupt 설정 비트 ET1 : Timer 1 interrupt 설정 비트 EX1 : External interrupt 1 설정 비트 ET0 : Timer 0 interrupt 설정 비트 EX0 : External interrupt 0 설정 비트
IP : INTERRUPT PRIORITY REGISTER - : 예약 PT2 : 타이머 2 인터럽트 우선순위 비트 PS : 시리얼 인터럽트 우선순위 비트 PT1 : 타이머 1 인터럽트 우선순위 비트 PX1 : 외부 /INT1 인터럽트 우선순위 비트 PT0 : 타이머 0 인터럽트 우선순위 비트 PX0 : 외부 /INT0 인터럽트 우선순위 비트
TCON : TIMER/COUNTER CONTROL REGISTER TF1 : Timer 1 over flag. 하드웨어적으로 세트 되고, 인터럽트 루틴 이 수행되면 자동으로 지워진다. TR1 : Timer 1 run control bit. 소프트웨어적으로 타이머를ON/OFF (RUN/PAUSE) 시킨다. TF0 : Timer 0 overflow flag TR0 : Timer 0 run control bit IE1 : 외부 인터럽트 에지(Edge) 플래그. IT1 : 인터럽트 1 타입 선택 비트. 1로 설정하면 전위가 high에서 low로 떨어질 때 인터럽트 발생, 0이면 low 일때 인터럽트 발생 IE0 : 외부 인터럽트 0 에지 플래그 IT0 : 인터럽트 0 타입 선택 비트
TMOD : TIMER/COUNTER MODE CONTROL REGISTER GATE : 1이면 하드웨어 적으로 RUN ,0 이면 소프트웨어 적으로 RUN C//T : 1이면 카운터, 0이면 타이머 M1,M0 : 동작 모드 선택
SCON : SERIAL PORT CONTROL REGISTER SM0,SM1 : 각각 0,1 로 설정 SM2 : 0으로 설정 REN : 수신가능 비트. 1로 설정하면 수신가능 TB8 : TRANSMIT BIT 8, 0으로 설정 RB8 : RECEIVE BIT 8, 0으로 설정 TI : SBUF의 데이터 비트들을 모두 전송하면 하드웨어적으로 1로 된다. 새로운 값을 전송하기 전에 소프트웨어로 클리어 해주어야 한다. RI : SBUF로 전송된 비트들을 모두 송신하면 하드웨어적으로 1이 된다. 수신된 데이터를 통신 버퍼에서 읽은 후에 소프트웨어적으로 클리어 해 주어야 한다.