Download
1 / 1
30 likes | 245 Views
Unitialized, Globally Optimal, Graph-Based Rectilinear Shape Segmentation - The Opposing Metrics Method. Input. 1st. 2nd. 3rd. 4th. Computer Science Department – Carnegie Mellon University, Pittsburgh Department of Imaging and Visualization – Siemens Corporate Research, Princeton.

E N D
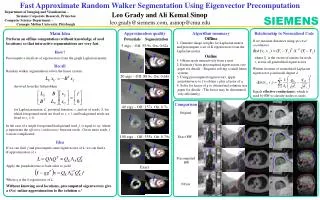
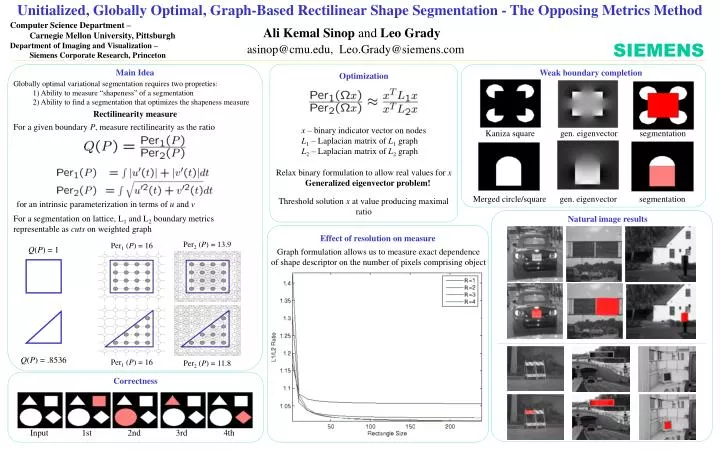
Unitialized, Globally Optimal, Graph-Based Rectilinear Shape Segmentation - The Opposing Metrics Method Input 1st 2nd 3rd 4th Computer Science Department – Carnegie Mellon University, Pittsburgh Department of Imaging and Visualization – Siemens Corporate Research, Princeton Ali Kemal Sinop and Leo Grady SIEMENS asinop@cmu.edu, Leo.Grady@siemens.com Main Idea Weak boundary completion Optimization Globally optimal variational segmentation requires two propreties: 1) Ability to measure “shapeness” of a segmentation 2) Ability to find a segmentation that optimizes the shapeness measure Rectilinearity measure For a given boundary P, measure rectilinearity as the ratio x – binary indicator vector on nodes L1 – Laplacian matrix of L1 graph L2 – Laplacian matrix of L2 graph Kaniza square gen. eigenvector segmentation • Relax binary formulation to allow real values for x • Generalized eigenvector problem! Merged circle/square gen. eigenvector segmentation Threshold solution x at value producing maximal ratio for an intrinsic parameterization in terms of u and v For a segmentation on lattice, L1 and L2 boundary metrics representable as cuts on weighted graph Natural image results Effect of resolution on measure Per2 (P) = 13.9 Per1 (P) = 16 Q(P) = 1 Graph formulation allows us to measure exact dependence of shape descriptor on the number of pixels comprising object Q(P) = .8536 Per1 (P) = 16 Per2 (P) = 11.8 Correctness