Download
1 / 28
290 likes | 716 Views
Waves Chapter 15. PHYS 2326-24. Concepts to Know. Transverse Waves Longitudinal Waves Periodic Waves Sinusoidal Waves Wavelength Wave Number Wave Velocity (Phase Velocity) Particle Velocity Group Velocity. Transverse Wave.

E N D
Waves Chapter 15 PHYS 2326-24
Concepts to Know • Transverse Waves • Longitudinal Waves • Periodic Waves • Sinusoidal Waves • Wavelength • Wave Number • Wave Velocity (Phase Velocity) • Particle Velocity • Group Velocity
Transverse Wave • A wave that vibrates the medium perpendicular to the direction of travel Examples • Ocean waves – rise and fall • Electromagnetic waves • A rope or a slinky shifted up and down or sideways • Earthquake S waves (secondary waves)
Longitudinal Waves • Sound waves compressing the air • A slinky (or spring) being compressed or expanded • Earthquake P waves (primary waves) • Some waves have both longitudinal and transverse components
Periodic Waves • Waves that repeat with the same waveform • A nonperiodic wave is often called a pulse
Sinusoidal Wave • A sinusoidal wave is described by a sine or cosine function.
Wavelength & Period y Variation at a point x over time T A t λ y Variation at a time over x A x
Wave Number The wave number or angular wave number is defined as k= 2π / λ Remember the angular frequency is ω = 2π / T = 2 π f Using these our wave eqn turns into 16.10 y = A sin(kx – ωt) Also, our speed v = ω/k = f λ NOTE: this k is not the spring constant
Wave Velocity • Wave Velocity or Phase Velocity is the speed that the phase such as the crest or trough of the wave travels through the medium
Group Velocity • Group velocity is the speed that the envelope or the variations in the shape of the wave travel • This is valid when there is a group of waves of slightly different frequency • This eqn will not be in any test
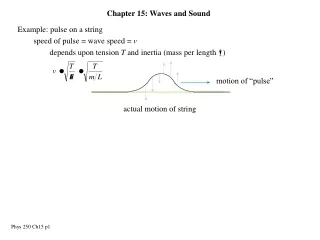
Particle Velocity • The velocity of a particle (real or imagined) as it transmits the wave • This motion may be longitudinal as in sound or transverse as a a guitar string on ocean wave. The equation is for a velocity in the y direction, regardless of whether the wave is moving in the y direction
Partial Differential Wave Equation • The linear wave equation 16.27 gives a complete description of the wave motion including the wave speed • Partials are used since the function is of both t and x • This is good for traveling waves such as transverse displacement on a string or longitudinal displacement from equilibrium for soundwaves
Example Problem Given a transverse wave y(x,t) = 0.02 sin(3t+2x) Find a) amplitude b) wavelength, c) frequency, d) period, e) velocity, f) particle displacement at t=1sec and x=2m, g) particle velocity there, h) acceleration there, i) the concavity of the wave there
a) amplitude A = 0.02 m – provided b) wavelength, wave eqn has (2π/λ)*x = 2x for our problem, so λ = π c) frequency, wave eqn. has ωt = 3t for our problem, ω = 3 = angular frequency ω = 2 π f, or f = ω /2 π = 3/6.28 = 0.478 Hz d) period, T=1/f = 2.09 seconds e)velocity, k=2 π/ λ, v= ω/k = 3/2 = -1.5 m/s or 1.5 m/s in the – x direction.
f) particle displacement y, at 1 second, 2 meters, y(x,t) = A sin (kx+ωt) y(2,1)=(0.02) sin(2(2) + 3(1)) = (0.02)sin(7r) sin(458°)(0.02) = 0.0131 m g)particle velocity, ,v(2,1) = ωA cos(kx+ωt) = (3)(0.02)cos(2(2) + 3(1)) = (0.06)cos(7r)= 0.0456m/s h) particle accel. ,a=-0.118 m/s^2 i)Concavity of the wave, rate of change of the change -(2)^2 cos(7r) = -0.05256
Periodic Motion • Motion that regularly returns to a given position. Mechanical example is an object attached to a spring • Equilibrium position – point where the spring is neither compressed nor stretched • Restoring force – force directed towards the equilibrium position • When the acceleration of the object is proportional to its position, it is Simple Harmonic Motion, SHM.
Hooke’s Law • F = -kx • Restoring force always directed towards equilibrium • Newton’s second law F=ma ma=-kx, a = -kx/m or –(k/m) x k is the spring constant, m the mass and a is the acceleration
Differential Notation • dx/dt = v = velocity • dv/dt = a = acceleration • d2x/dt2 = dv/dt = a • d2x/dt2 = -(k/m) * x Let k/m = ω2 - renaming this ratio to something else • d2x/dt2 = -(ω2) * x find a satisfactory solution for a 2nd order differential equation that is a function of the position x
x(t) = Acos(ωt+Φ) is a function that is a solution to the 2nd differential as well • dx/dt = - ωAsin(ωt+Φ) = v • d(dx/dt)/dt =- ω2Acos (ωt+Φ) = a • note this is - ω2x • Note the cosine is periodic with ωt • when ωt reaches 2π radians it has completed a full cycle from 0 radians and • ω = sqrt(k/m) because we defined it that way • Φ is a phase constant or initial phase angle at time t = 0
Amplitude • x(t) = Acos(ωt+Φ) • A is the amplitude or peak displacement • Since cos varies between +/-1.0, A determines just how far the object moves away from the equilibrium point • Note A doesn’t affect how x changes in time and the angle doesn’t change the peak amplitude
Velocity & Acceleration • dx/dt = - ωAsin(ωt+Φ) = v • d(dx/dt)/dt =- ω2Acos (ωt+Φ) = a • Since sin varies between +/- 1 so • ωA becomes the peak velocity • Note while Amplitude (position) doesn’t depend upon ω, velocity & acceleration do
Period & Frequency • ω is the angular frequency and it is normally in radians / second when t is in seconds. Since a cycle is complete for 2π radians, then one can have a frequency f • f = ω/ 2π or ω = 2πf f is normally in Hertz, Hz • The time it takes to complete a cycle is T, the period. In mks units – T is in seconds • f = 1/T or T = 1/f
Circle of Reference • Given a circle of diameter A and angle ωt which is a function of time one can note that the position along the x axis becomes Acos(ωt). Also the y position is A sin(ωt) • Velocity is proportional to y = A sin(ωt) Observe when x = +/-A, y=0 when x = 0 y is maximum Acceleration is proportional to x so when x is +/- A, a = maximum when x is 0, a=0 y ωt x
Energy • Total energy is the sum of kinetic, Ek or K, and potential energy, Ep or U. • Ek = ½ mv2 • E = K + U • From chapter 7.8 The work done within a system by a conservative force equals the decrease in potential energy of the system • Since F=-kx • U=1/2 kx2