Download
1 / 4
200 likes | 1.06k Views
Détermination de. Soit D un point tel que. Cinématique graphique. 0. O. Liaison pivot entre 3 et 2 donc. 3/0 rotation autour de A. 5/0 translation donc :. 1. Triangle des vitesses. A. 2. D. 3. 5. I. B. H. C. 4.

E N D
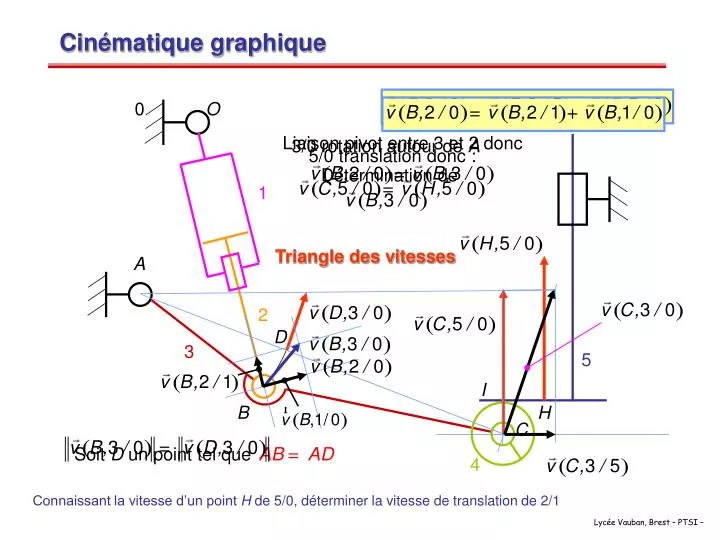
Détermination de Soit D un point tel que Cinématique graphique 0 O Liaison pivot entre 3 et 2 donc 3/0 rotation autour de A 5/0 translation donc : 1 Triangle des vitesses A 2 D 3 5 I B H C 4 Connaissant la vitesse d’un point H de 5/0, déterminer la vitesse de translation de 2/1 Lycée Vauban, Brest – PTSI –
Cinématique graphique Triangle des vitesses équiprojectivité 3 A’ A’ 2 I30 1 0 Liaison pivot 3/2 d’axe passant par B Liaison pivot 3/1 d’axe passant par A Le CIR du mouvement de 3/0 est à l’intersection des perpendiculaires aux vitesses de A et B par rapport à 0 Connaissant la vitesse de A 1/0, déterminer la vitesse de P 3/0. Lycée Vauban, Brest – PTSI –
et déterminer Connaissant Cinématique graphique 2/0 rotation d’axe (B,z) 1/0 rotation d’axe (O,z) 2/1 translation de direction AH Lycée Vauban, Brest – PTSI –
Cinématique graphique Déterminer la vitesse de rotation du piston 4/0, connaissant le taux de rotation 1/0. Triangle des vitesses 0 Direction de la vitesse de B/0 C Direction de la vitesse de D 4/3 D O 4 A B 1 0 Direction de la vitesse de D 4/0 3 2 équiprojectivité Composition des vitesses en D entre 4, 3 et 0 Composition des vitesses et B sur l’axe de la liaison pivot 2/3 Lycée Vauban, Brest – PTSI –