Download
1 / 9
110 likes | 433 Views
Flight Control System. Maria Luviano – Aerodynamics development Shing Chi Chan – FCS Lead / PID controller development Adrienne Lam – Avionics Lead / FCS simulation Jorge Estrada – Embedded programming development Gerardo Zarate – PID controller development. FCS Configuration.

E N D
Flight Control System Maria Luviano – Aerodynamics development Shing Chi Chan – FCS Lead / PID controller development Adrienne Lam – Avionics Lead / FCS simulation Jorge Estrada – Embedded programming development Gerardo Zarate – PID controller development
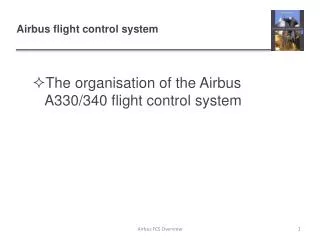
FCS Configuration • Our PID Controller • Enables rudder control • Maintains heading upon landing • Implemented within the C codes • Requirements: • Specified heading • UAV’s current heading • Landing sequence must be triggered at correct time PID Controller Physical Rudder/Landing Gear Steering Remote Control Receiver IN OUT Any input into this channel overrides Arduino FCS Arduino FCS
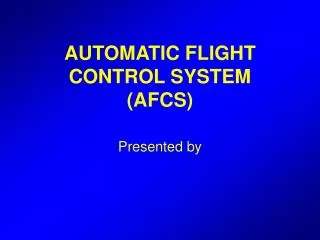
Simulation Configuration Physical Rudder/Landing Gear Steering PID Controller Computer X-Plane Simulator Mission Planner Remote Control Receiver IN OUT Any input into this channel overrides ArduinoFCS Arduino FCS USB
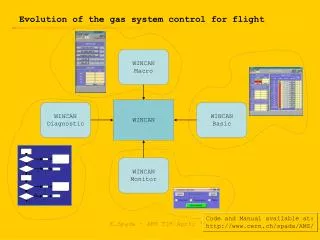
Landing Procedure Airfield 10 10 10 10 10 5 6 7 8 9 30 4 Calibrate landing heading “Lock” heading Throttle down during landing Flight path Waypoint Waypoint Altitude (ft) Landing sequence triggered
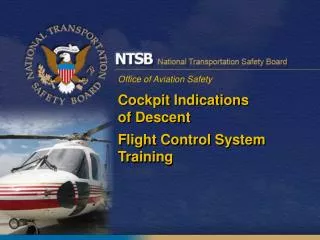
Rudder Control Let: θC = Current heading θR = Referenceheading Δθ = ( θR– θC ) = Bearing error For: Δθ ≈ 0, aircraft is on course Δθ ≠ 0, apply rudder control Δθ = positive, steer right Δθ = negative, steer left N = 0º W E Positive direction S θC Δθ θL Δθ = ( θL– θC ) yφθΔ
Rudder Block Diagram At the current stage, we are employing the Proportional Gain (Kp) and the Integral Gain (KI) of the controller. We are using Kp = 5/80. This Kp is obtained from calibration of the current system. The KI is still being tuned to a more desired value.
Simulation output • A video playback recorded during simulation with the help of the PID controller.
PID Control Fine-tuning • Areas requiring fine-tuning: • The Gain and Phase margin needs to be fine tuned to ensure the stability of the rudder • The Gain for all others (Yaw, Pitch, Roll) would need to be suppressed during landing to minimize the effect of rapid overshooting of counter actions • The aerodynamic properties of the Rudder would need to be formulated. (Currently, we estimated the gains based on simulation and calibration)
New Troubleshooting Tools • The Linux Ununtu Server version 10.10 with Torise SVN subversion control • With the version control, we were able to quickly revert our code to any previous baseline which significantly reducing the time required to perform programming debugs • The Linux “grep” command for rapid recursive “text” searching • With the “grep” command, it minimizes the amount of searching time for particular variable and function in the C programs. We used this extensively to trace down a series of important pre-defined constants and sub-routines