Download
1 / 25
250 likes | 544 Views
Satellite geodesy: Kepler orbits, Kaula Ch. 2+3.I1.2a. Basic equation: Acceleration Connects potential, V, and geometry. (We disregard disturbing forces – friction). C.C.Tscherning, 2007-10-25. Velocity: Integration along orbit. Position: one integration more. C.C.Tscherning, 2007-10-25.

E N D
Satellite geodesy: Kepler orbits, Kaula Ch. 2+3.I1.2a • Basic equation: Acceleration • Connects potential, V, and geometry. (We disregard disturbing forces – friction). C.C.Tscherning, 2007-10-25.
Velocity: Integration along orbit. • Position: one integration more C.C.Tscherning, 2007-10-25.
Orbit integration and parameter determination • We must know (approximatively) the orbit to make the integration. • The equation connects the position and velocity with parameters expressing V. • Parameters: kMCij C.C.Tscherning, 2007-10-25.
Observations • Directions and distances from Earth using Cameras, lasers, radar-tracking, time-differences • Distances from satellites to ”point” on Earth surface (also ”cross-overs”) • Range rates: Doppler effect, contineous tracking. • Measurements in or between satellites: gradiometry, GPS-positions, ranging C.C.Tscherning, 2007-10-25.
Parameters • Spherical harmonic coefficients, kMCij • Positions of ground tracking stations • Changes to Earth Rotation and pole-position • Tides (both oceanic and solid earth) • Drag-coefficients, air-density • Contributions from Sun and Moon. C.C.Tscherning, 2007-10-25.
Ordinary differential equations • Change from 3 second order equations to 6 first-order equations: C.C.Tscherning, 2007-10-25.
Coordinate transformation in 6D-space • New coordinates qi and pi . C.C.Tscherning, 2007-10-25.
(q,p) selected so orbits straight lines • If • Possible also so that kmCij ”amplified”. C.C.Tscherning, 2007-10-25.
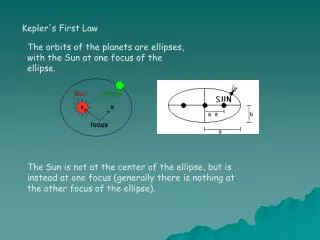
Kepler orbit • If potential V=km/r: • Orbit in plane through origin (0). • Is an ellipse with one focus in origin C.C.Tscherning, 2007-10-25.
Geometry • E and f C.C.Tscherning, 2007-10-25.
Kepler elements • i=inclination, Ω=longitude of ascending node (DK: knude) • e=excentricity, a=semi-major axis, • ω=argument of perigaeum, f+ ω=”latitude”. • M=E-esinE=Mean anomaly (linear in time !) C.C.Tscherning, 2007-10-25.
From CIS to CTS • We must transform from Conventional Inertial System to Conventional Terrestrial System using siderial time, θ: • Rotation Matrix C.C.Tscherning, 2007-10-25.
From q-system to CIS • 3 rotations. Ri with integer i subscript is rotation about i-axis. Rxu is rotation from u to x. C.C.Tscherning, 2007-10-25.
Elliptic orbit • We use spherical coordinates r,λ in (q1,q2)-plane C.C.Tscherning, 2007-10-25.
Angular momentum • λ is arbitrary := 0 ! C.C.Tscherning, 2007-10-25.
Integration • With u=1/r C.C.Tscherning, 2007-10-25.
Integration C.C.Tscherning, 2007-10-25.
Ellipse as solution • If ellipse with center in (0,0) C.C.Tscherning, 2007-10-25.
Expressed in orbital plane C.C.Tscherning, 2007-10-25.
Parameter change C.C.Tscherning, 2007-10-25.
Further substitution C.C.Tscherning, 2007-10-25.
Transformation to CIS C.C.Tscherning, 2007-10-25.
Velocity C.C.Tscherning, 2007-10-25.
From orbital plane to CIS • . C.C.Tscherning, 2007-10-25.
Determination of f • . C.C.Tscherning, 2007-10-25.