Download
1 / 18
210 likes | 555 Views
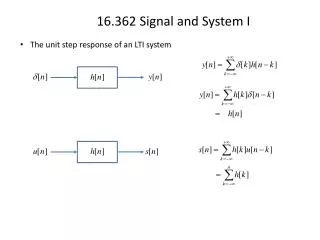
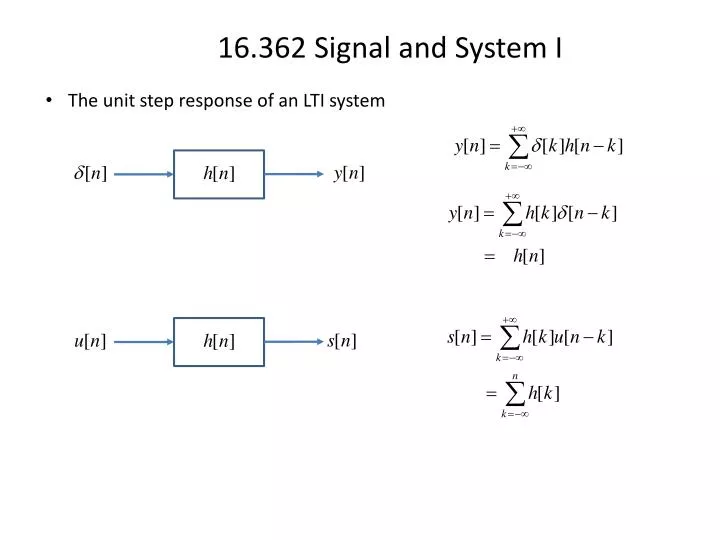
The unit step response of an LTI system. The unit step response of an LTI system. The unit step response of an LTI system. Linear constant-coefficient difference equations. +. delay. depends on x[n]. We don’t know y[n] unless x[n] is given.

E N D
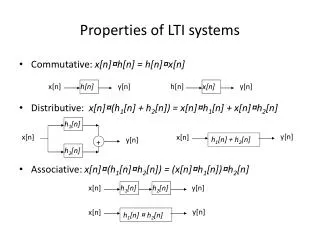
Linear constant-coefficient difference equations + delay depends on x[n]. We don’t know y[n] unless x[n] is given. But h[n] doesn’t depend on x[n]. We should be able to obtain h[n] without x[n]. How? • LTI system response properties, this chapter. • Discrete Fourier transform, --- Ch. 5.
Linear constant-coefficient difference equations + delay When n 1, Causality
Linear constant-coefficient difference equations + delay Determine A by initial condition: When n = 0, A = 1
Linear constant-coefficient difference equations + delay Two ways: (1) Repeat the procedure (2)
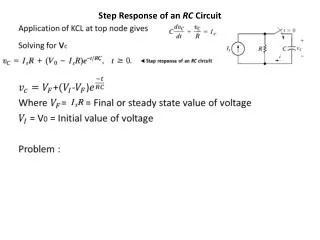
Linear constant-coefficient difference equations + depends on x(t). We don’t know y(t) unless x(t) is given. But h(t) doesn’t depend on x(t). We should be able to obtain h(t) without x(t). How? • LTI system response properties, this chapter. • Continuous time Fourier transform.
Linear constant-coefficient difference equations + When t>0, Causality Determine A by initial condition:
Linear constant-coefficient difference equations + Determine A by initial condition: A = 1
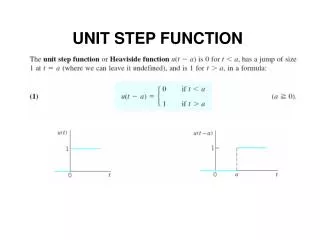
Singularity functions Define:
Singularity functions k terms