Download
1 / 18
180 likes | 286 Views
Prognosis of Gear Health Using Gaussian Process Model. Department of Adaptive systems, Institute of Information Theory and Automation , May 2011, Prague. Motivation. An estimated 95% of installed drives belong to older generation - n o embedded diagnostics functionality

E N D
Prognosis of Gear Health Using Gaussian ProcessModel Department of Adaptive systems, Institute of Information Theory and Automation, May 2011, Prague
Motivation • An estimated 95% of installed drives belong to older generation - no embedded diagnostics functionality • poorly or not monitored • These machines will still be in operation for some time! • Goal: to design a low cost, intelligent condition monitoring module
Outline • Problem description • Experimental setup • Gaussian Process models • Time series modelling and prediction • Conclusions
Problem description Gear health prognosis using feature values from vibration sensors Model the time series using discrete-time stochastic model Time series prediction using the identified model Prediction of first passage time (FPT)
Experimental setup Experimental test bed with motor-generator pair and single stage gearbox
Experimental setup Vibration sensors Signal acquisition
Experimental setup • Experiment description • 65 hours • constant torque (82.5Nm) • constant speed (990rpm) • accelerated damage mechanism (decreased surface area)
Feature extraction For each sensor, a time series of feature value evolution is obtained, only y8 used
Outline • Problem description • Experimental setup • Gaussian Process models • Time series modelling and prediction • Conclusions
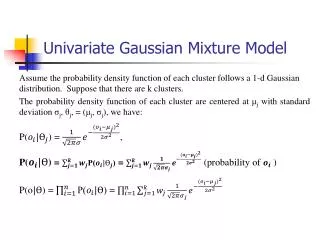
GP model • Probabilistic (Bayes) nonparametric model • Prediction of the output based on similarity test input – training inputs • Output: normal distribution • Predicted mean • Prediction variance
Nonlinear fuctionand GP model 10 8 Nonlinear function to be modelled from learning points 8 y=f(x) 6 Learning points 6 4 y 2 4 0 y 2 -2 0 -4 Learning points m ± s 2 -2 -6 m -1.5 -1 -0.5 0 0.5 1 1.5 2 f(x) x -4 Prediction error and double standard deviation of prediction -1.5 -1 -0.5 0 0.5 1 1.5 2 x s 2 6 |e| 4 e 2 0 -1.5 -1 -0.5 0 0.5 1 1.5 2 x Static illustrative example • Static example: • 9 learning points: • Prediction • Rare data density increased variance (higher uncertainty).
GP model attributes (vs. e.g. ANN) • Smaller number of parameters • Measure of confidence in prediction, depending on data • Data smoothing • Incorporation of prior knowledge * • Easy to use (engineering practice) • Computational cost increases with amount of data • Recent method, still in development • Nonparametrical model * (also possible in some other models)
Outline • Problem description • Experimental setup • Gaussian Process models • Time series modelling and prediction • Conclusions
The modelling of feature evolution as time series and its prediction
Prediction of the time when harmonic component feature reaches critical value
Conclusions • Application of GP models for: • modelling of time-series describing gear wearing • prediction of the critical value of harmonic component feature • Two models useful: • Matérn+polynomial+constant covariance function • Neural-network covariance function • Useful information 15 to 20 hours ahead – soon enough for maintenance