Download
1 / 12
130 likes | 456 Views
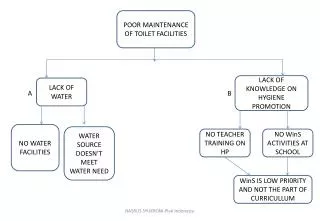
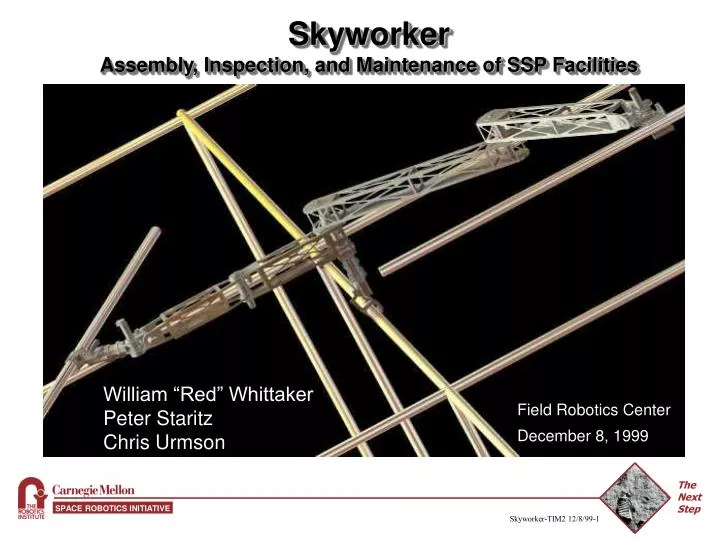
Skyworker Assembly, Inspection, and Maintenance of SSP Facilities. Field Robotics Center December 8, 1999. William “Red” Whittaker Peter Staritz Chris Urmson. Space Solar Power Assembly, Inspection, and Maintenance (AIM). Extensive structures Kilometers in dimension Millions of parts

E N D
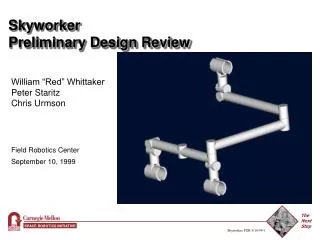
SkyworkerAssembly, Inspection, and Maintenance of SSP Facilities Field Robotics Center December 8, 1999 William “Red” Whittaker Peter Staritz Chris Urmson
Space Solar Power Assembly, Inspection, and Maintenance (AIM) • Extensive structures • Kilometers in dimension • Millions of parts • SSP environment • Wide temperature range, sometimes exceeding 500K • Solar Proton Events • Galactic Cosmic Radiation • Microwave Radiation • Kilovolt buses • Long duration operations • 1 year construction • 30 years operation
Motivation for a Robotic Workforce • High, inaccessible orbit • Overwhelming EVA agenda • Millions of parts • 10’s of Millions of Manipulations • Long term operations • Harsh environment • Robots are expendable and repairable • Lower support costs
Assembly, Inspection, and Maintenance Tasks • 3D agile traversal of a truss structure • Pick up and place payloads at arbitrary locations and orientations • Carry payloads while walking, turning, and transitioning planes • Conduct calibration and inspection tasks • Connect power and communications cables • Cooperatively carry bulky, massive payloads • Perform tasks that require multiple robot collaboration Current Program Future Work
Possible Avenues • Free Flying Systems • Require expenditure of mass to move • Result in tons of spare fuel • Risky docking operations • Fixed Manipulators (e.g. shuttle & station) • Anchored to a hard point on the structure • Limited reach • Longer reach results in larger dynamic/reaction forces • Attached Mobile Manipulators (AMM) • No mass expenditure • “Unlimited” reach • Ability to “walk lightly” • Temporarily attach for working reaction forces • AMM is the archetype for SSP AIM
Skyworker Scope • Robot Prototype and Software Simulation • Demonstrate the viability of using robots for orbital construction • Prove the validity of using structure walkers for orbital AIM • Demonstrate SSP AIM relevant tasks using robotics • Simulate prospective SSP AIM robots and tasks
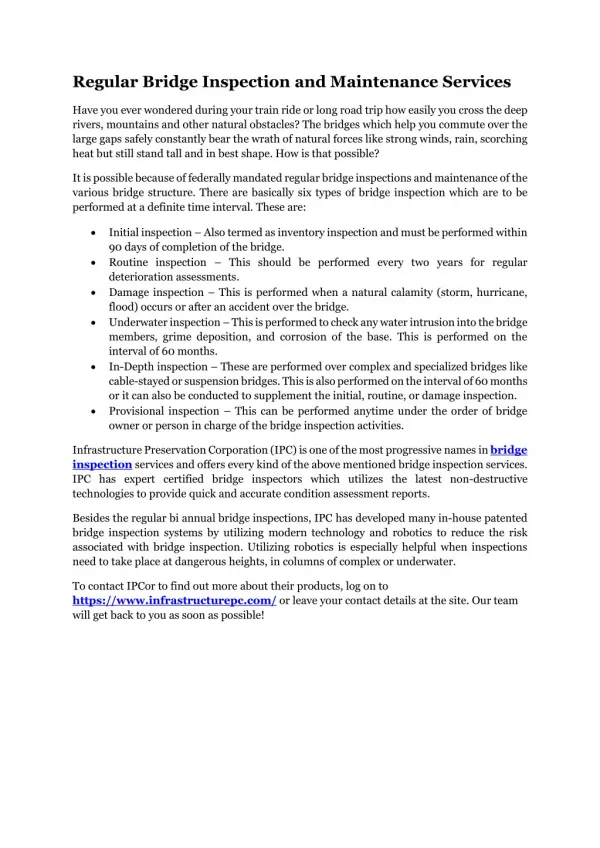
Skyworker • Self Contained • Continuous gait allows payload to move at constant velocity • Requires less energy • Exerts less stress on the structure (walks lightly) • Counterbalanced to emulate micro g • Onboard processor and distributed control network • Mass: ~35 kg • Dimensions: 3 m x .5 m x .1 m • 11 DOF
Skyworker Simulation • 3D visualization of SSP AIM activity • Allows study of operations, and scale effects • Kinematic models demonstrate extended operations • Coordinated operations • Long term, large scale tasks
Results to Date • Skyworker developed • Component testing complete • Simulation package operational • Concept to operation in 99 days
Demonstration • Prototype • Pick up and carry a model transmitting element the length of the truss, turn while carrying, couple the element to the structure • Perform a mock calibration • Demonstrate “walking lightly” • Simulation • Perform prototype robot tasks • Perform plane transition • Assemble a large scale construction utilizing multiple robots • Emphasis placed on system level activity • Current grippers and sensors are placeholders for future development
Development Team • Skyworker has been developed by a team of staff and students at CMU • William “Red” Whittaker • Chris Gaiser • Oren Laskin • Dewitt Latimer • Jason Messinger • Jonathan Samuel • Sarjoun Scaff • Peter Staritz • Chris Urmson • Tim Warneck • Will Wong
11 10 8 9 5 3 6 2 4 7 1 Skyworker DOF