Download
1 / 13
130 likes | 242 Views
Robotic Assembly and Maintenance of Space Solar Power Facilities. Red Whittaker The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 red@ri.cmu.edu. Vision. SSP is a compelling motivation for a robotic workforce decades of operational life in high orbit

E N D
Robotic Assembly and Maintenance of Space Solar Power Facilities Red WhittakerThe Robotics InstituteCarnegie Mellon UniversityPittsburgh, PA 15213 red@ri.cmu.edu
Vision SSP is a compelling motivation for a robotic workforce • decades of operational life in high orbit • extensive scale and repeating topology • fragile and flexible structures • repetitive construction and maintenance tasks Robots are an enabling technology for SSP • join structural elements, make electrical connections, replace electronics modules, perform inspections,… • provide full life cycle robotic presence Walking sticks are favored over fixed and free flying robots • free-flyers expend propellant and incur docking risks • fixed manipulators require base structure, vast length and impart large base reaction forces • walking sticks are an unexplored technology
Heritage Systems & Technologies Self Mobile Space Manipulator • node walker • adaptive control • visual tracking • gravity compensation
Heritage Systems & Technologies Ambler and Dante walking robots • gait planning • closed kinematic chain control • force regulation • task control
Heritage Systems & Technologies RWV and Pioneer worksystems • mobile manipulation • tooling • task operations
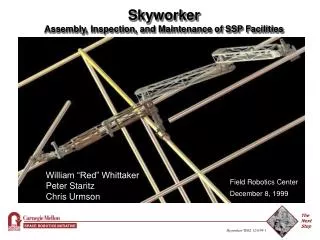
Skyworker - Walking Stick • Assembles and maintains SSP facilities • Grasps payloads and connects to other Skyworkers • “Walks” by successive attachment to SSP backbone • Steps softly and accommodates flexible structures
9-Month Objectives • Demonstrate SSP relevant AIM tasks using robotics • carry and handle materials • mate mechanical and electrical components • inspect surfaces, structure and modules • Emulate prospective SSP AIM robots and tasks • explore alternative Skyworker designs and derive optimal robot configuration • simulate Skyworker capabilities beyond those physically demonstrated • investigate alternative task approaches
PDR CDR Project Schedule month 0 2 4 6 9 Skyworker Development Robot Tests& Exercises ConfigurationAnalysis & Design Demonstration SkyworkerEmulatorDevelopment CapabilityStudies
Robot Demonstrator • Mobility on representative SSP structures • attachment to structural elements • gait and motion control on flexible structures • threading between and wrapping around elements • Manipulation of representative SSP components • grasping, carrying and docking of objects & tools • manipulation force regulation • Goals • understand the robot’s interaction with SSP structures • verify robot configuration • task sequencing • human interfaces • automated inspection
Robot Emulator • Quantify energy efficiency, speed, accuracy,… • Explore alternative approaches to tasks • cooperating robots (pairs, triples, …) • individuals linked together in chains (parallel, serial) • Model automation technologies • motion sequencing, perception, safeguarding • advanced task automation • automated inspection • Goals • plug ‘n play compatibility with robot demonstrator • variable speed (real-time ±) operation • faithful representation of physics
configuration • task analysis • robot kinematics • SSP facility mockup • extent • flexibility • geometry • mechatronics • sensors • mechanicals • electronics • control • mobility • manipulation • automation • operations • tasks • demonstration • tools & payloads • gravity compensation Process Map • emulation • kinetics • dynamics • planning • gait • grasp