Download
1 / 30
• 300 likes • 449 Views
Estimointi Laajennettu Kalman-suodin. AS-84.161, Automaation signaalinkäsittelymenetelmät Laskuharjoitus 4. Estimointi. Systeemin tilaa estimoidaan, kun prosessin tilamalli tunnetaan Tilamalli voi olla lineaarinen tai yleisessä muodossa. Ideaalinen tilamalli. Lineaarinen tilamalli

E N D
EstimointiLaajennettu Kalman-suodin AS-84.161, Automaation signaalinkäsittelymenetelmät Laskuharjoitus 4
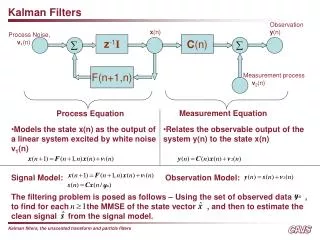
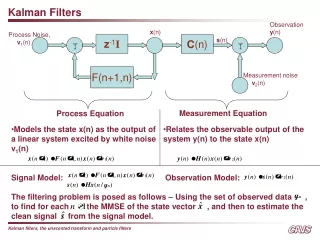
Estimointi • Systeemin tilaa estimoidaan, kun prosessin tilamalli tunnetaan • Tilamalli voi olla lineaarinen tai yleisessä muodossa
Ideaalinen tilamalli • Lineaarinen tilamalli • Yleisessä muodossa oleva tilamalli
Todellinen (kohinainen) tilamalli • Lineaarinen tilamalli • Yleisessä muodossa oleva tilamalli
Kohina • Kohinakomponentit käsitellään usein nollakeskiarvoisina, ja niiden kovarianssit oletetaan tunnetuiksi • Ellei todellisia kovariansseja tunneta, käytetään kovarianssimatriiseja viritysparametreina
Varianssi • Kuvaa yhden (satunnais)muuttujan vaihtelua • Nollaksekiarvoisen muuttujan varianssi lasketaan muuttujan arvojen neliöiden keskiarvona
Kovarianssi • Kuvaa useamman muuttujan vaihtelua • Muuttujat pystyvektorissa • Nollakeskiarvoisen muuttujan kovarianssi lasketaan muuttujavektorin ja sen transpoosin keskiarvona • Diagonaalielementit kunkin muuttujan variansseja • Muut elementit kuvaavat muuttujien keskinäisiä kovariansseja
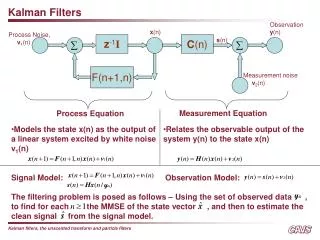
Kalman-suodin • Estimoi prosessin sisäistä tilaa • Ennakoi prosessin tilaa perustuen malliin • Korjaa ennakoitua estimaattia perustuen mittaukseen • Mittauksen ja estimaatin keskinäinen paino riippuu mittausten, prosessimallin ja estimaatin kovariansseista
Laajennettu Kalman-suodin • Kalman-suotimen perusversio toimii vain lineaarisilla tilamalleilla • Laajennettua Kalman-suodinta voidaan käyttää myös epälineaaristen prosessien kanssa
Laajennettu Kalman-suodin • Prosessin tilamalli yleisessä muodossa • Kohinatermien w(k) ja v(k) kovarianssit
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Laajennettu Kalman-suodin Prosessi x syöte u u y y(k) A-priori- estimaatti (ennakointi) x(k|k-1) u(k-1) A-posteriori- estimaatti (korjaus) x(k|k) + - ^ x(k-1|k-1) ^ ^
Ajanhetki, johon asti on olemassa mittausdataa Tarkasteltava ajanhetki Indeksien merkintä • A-priori –estimaatti: ennakointi x(k | k –1) • A-posteriori –estimaatti: korjaus x(k | k) tai x(k –1 | k –1) ^ ^ ^
Vahvistusmatriisi K • Kuvaa mallin tarkkuutta • Jos jotkin osat mallissa ovat epätarkkoja, painotetaan mittauksia enemmän kuin mallia • Lineaarisessa ja staattisessa tapauksessa K-matriisia voidaan pitää vakiona • Epälineaarisessa tapauksessa K pitää laskea jokaisella kierroksella uudelleen
Vahvistusmatriisi K ^ • K lasketaan käyttäen hyväksi estimaatille x estimoitua kovarianssia P • P:lle lasketaan a-priori- ja a-posteriori-estimaatit • P:n ja K:n laskemisessa tarvitaan lineaarisen mallin matriiseja A ja C
A- ja C-matriisien linearisoiminen • Lasketaan Jakobin matriisi (jakobiaani) • Derivoidaan f:n kukin komponentti x:n komponenttien suhteen • Matriisi, jota voidaan käyttää A:n paikalla • Derivoidaan h:n kukin komponentti x:n komponenttien suhteen • Matriisi, jota voidaan käyttää C:n paikalla
Esimerkki • Tilavektorissa x(k) on 2 elementtiä: x1, x2 f(k) on vektori, jossa on 2 elementtiä: f1, f2 A(k) on 2x2 kokoinen • A:n korvaava matriisi:
Esimerkki • Mittausvektorissa y(k) on 1 elementti h(k) on vektori, jossa on 1 elementti C(k) on 1x2 kokoinen • C:n korvaava matriisi:
Laajennetun Kalman-suotimen kaavat 1/7 • Tilan ennakointi seuraavaan mittaushetkeen
Laajennetun Kalman-suotimen kaavat 2/7 • A:n korvaava derivaatta
Laajennetun Kalman-suotimen kaavat 3/7 • Tilan estimointivirheen kovarianssi (ennakointi) seuraavaan mittaushetkeen
Laajennetun Kalman-suotimen kaavat 4/7 • C:n korvaava derivaatta
Laajennetun Kalman-suotimen kaavat 5/7 • Estimoinnin vahvistuksen K(k) laskenta
Laajennetun Kalman-suotimen kaavat 6/7 • Tilan päivitys mittauksella
Laajennetun Kalman-suotimen kaavat 7/7 • Tilan estimointivirheen kovarianssin päivitys
Rekursio • Siirrytään seuraavaan ajanhetkeen k+1 • x(k|k) x(k-1|k-1) • P(k|k) P(k-1|k-1) • Palaataan Kalman-suotimen vaiheeseen 1 ^ ^