Download
1 / 12
120 likes | 264 Views
BE/ABP-SU/. Simulations of laser tracker AT401 measurements on TM0 CLIC girders. BE/ABP-SU/. Contents. Introduction Simulation on Main Beam Girder Supporting system Accelerating structures AT401 stations Results Simulation on Drive Beam Girder Supporting system Components

E N D
BE/ABP-SU/ Simulations of laser tracker AT401 measurements on TM0 CLIC girders
BE/ABP-SU/ Contents Introduction Simulation on Main Beam Girder Supporting system Accelerating structures AT401 stations Results Simulation on Drive Beam Girder Supporting system Components AT401 stations Results Conclusions
BE/ABP-SU/ Introduction • Subject of the presentation • To present the simulation calculations of measurements which will be performed by laser tracker AT401 for Type 0 module. • Principle of simulations • Input: realistic approximate coordinates of points and a priori accuracies of the laser tracker Leica AT401. • Calculations: simulations based on the Monte-Carlo method. • Output: rms accuracies for each point along the X, Y and Z axes. • Objectives • To estimate the accuracies that will be obtained during real measurements on the CLIC mock-up. • To determine the number of stations to implement and their locations.
BE/ABP-SU/ Simulation on Main Beam Girder Supporting system • Supporting system = • 1 girder + 2 stations. • 7 fiducials on girders and 4 on sensor plates. • Coordinate system: • Z = vertical, • Y = theoretical beam axis. Beam • Study of the girder Micro-Contrôle 1 available for the girder 2. Beam
BE/ABP-SU/ Simulation on Main Beam Girder Accelerating structures • 2 alignment disks for each of the 8 accelerating structures. • 4 fiducials per alignment disk (only 2 visible from outside). • Fiducial = conical bore to receive 0.5’’ probe (CMM or measuring arm) or reflector CCR 0.5’’ (Corner Cube Reflector).
BE/ABP-SU/ Simulation on Main Beam Girder AT401 stations • Graphical determination of the number of stations and their locations (Autocad 2010). • Distance station/AS fiducial > 1.5 m • 5 stations are required to measure all the AS fiducials at least 2 times. • Height of the station was set to Z = 0 to allow the targeting of points below and above the waveguides
BE/ABP-SU/ Simulation on Main Beam Girder Results • Simulation calculations using LGC++ v1.09.03 (SU software). • A priori data comes from the measurements of a test bench performed before the laser tracker AT401 was ordered and after its reception : • A priori accuracy of the horizontal and vertical angles is 1.3 cc, • A priori accuracy of the distances is 5 µm. • The girder point MC1-2 is declared as fixed, the point MC1-11 is used for the orientation and all other points are free. • “3D” = quadratic sum of the 3 accuracies this sum is pessimistically considered as the 3D rms accuracy. • The worst 3D accuracy (only on the AS fiducials) = 6.5 µm. • If we consider that the longitudinal axis is not critical, worst accuracy < 6 µm.
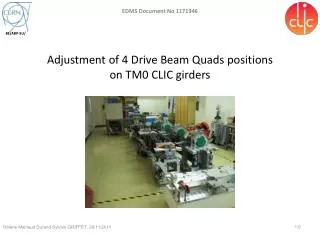
BE/ABP-SU/ Simulation on Drive Beam Girder Supporting system • Supporting system = • 1 girder + 2 cradles. • 10 fiducials on girders and 8 on cradles. • Coordinate system: • Z = vertical, • Y = theoretical beam axis. Beam Beam • Study of the girder Boostec 3069 available for the girder 3079.
BE/ABP-SU/ Simulation on Drive Beam Girder Components • 2 PETS subassemblies: 1PETS and 2PETS. Each of them equipped with 12 CCR 0.5’’ holders (only 6 visible from outside). • 6 CCR 1.5’’ holders for each of the 2 DBQ (4 visible from each side). • Each of the 2 BPM equipped with 3 CCR 0.5’’ holders. Beam
BE/ABP-SU/ Simulation on Drive Beam Girder AT401 stations • Graphical determination of the number of stations and their locations. • Distance station/fiducial > 1.5 m • 4 stations are required to measure all the fiducials at least 2 times.
BE/ABP-SU/ Simulation on Drive Beam Girder Results • Same software and same a priori data as seen for Main Beam. • The girder point B3069-1 declared as fixed, the point B3069-10 is used for the orientation and all other points are free. • The worst 3D accuracy (only on the components fiducials) < 7.5 µm. • If we consider that the longitudinal axis is not critical, worst accuracy < 6.5 µm.
BE/ABP-SU/ Conclusions • The AT401 measurements will be performed, among others, during the following steps: • Validation of a pre-alignment obtained using sensors, • Determination of the components’ locations before and after transport test, • Monitoring of the components and the girders during the thermal tests. • The results obtained by the two simulations presented here are promising : • For both kinds of girder, we can expect rms accuracies on the components less than 6.5 µm. • The work done before calculating allowed us to determine the configuration of the networks and the number of necessary stations. • Finally it is necessary to remember that these accuracies are achievable only if the measurement conditions are extremely good: no vibration, no air flow, stable temperature, etc.