Download
1 / 1
10 likes | 198 Views
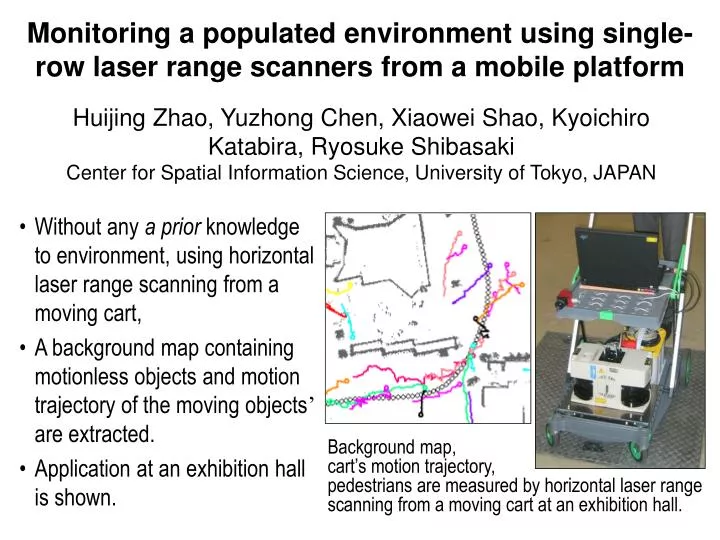
Monitoring a populated environment using single-row laser range scanners from a mobile platform. Huijing Zhao, Yuzhong Chen, Xiaowei Shao, Kyoichiro Katabira, Ryosuke Shibasaki Center for Spatial Information Science , University of Tokyo, JAPAN.

E N D
Monitoring a populated environment using single-row laser range scannersfrom a mobile platform Huijing Zhao, Yuzhong Chen, Xiaowei Shao, Kyoichiro Katabira, Ryosuke ShibasakiCenter for Spatial Information Science, University of Tokyo, JAPAN • Without any a prior knowledge to environment, using horizontal laser range scanning from a moving cart, • A background map containing motionless objects and motion trajectory of the moving objects’ are extracted. • Application at an exhibition hall is shown. Background map, cart’s motion trajectory, pedestrians are measured by horizontal laser range scanning from a moving cart at an exhibition hall.