Download
1 / 1
10 likes | 146 Views
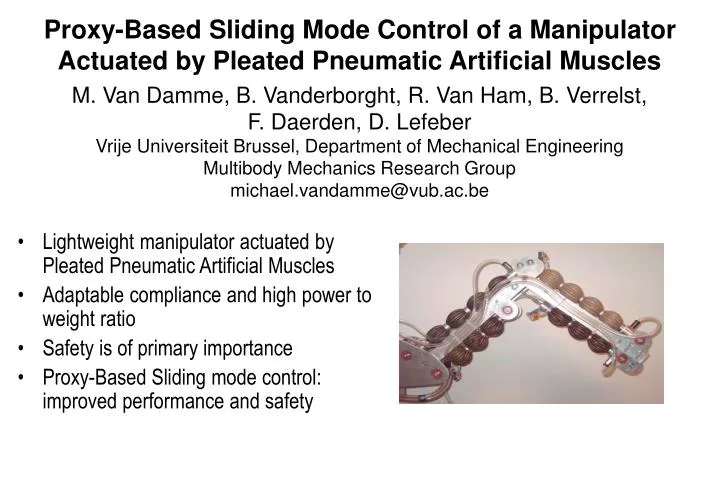
Proxy-Based Sliding Mode Control of a Manipulator Actuated by Pleated Pneumatic Artificial Muscles.

E N D
Proxy-Based Sliding Mode Control of a Manipulator Actuated by Pleated Pneumatic Artificial Muscles M. Van Damme, B. Vanderborght, R. Van Ham, B. Verrelst,F. Daerden, D. LefeberVrije Universiteit Brussel, Department of Mechanical EngineeringMultibody Mechanics Research Groupmichael.vandamme@vub.ac.be • Lightweight manipulator actuated by Pleated Pneumatic Artificial Muscles • Adaptable compliance and high power to weight ratio • Safety is of primary importance • Proxy-Based Sliding mode control: improved performance and safety