Download
1 / 14
140 likes | 455 Views
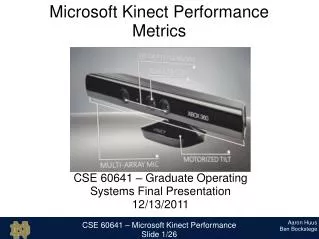
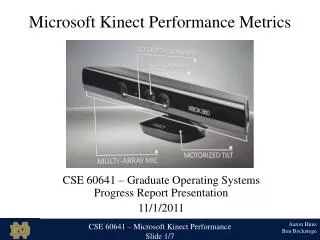
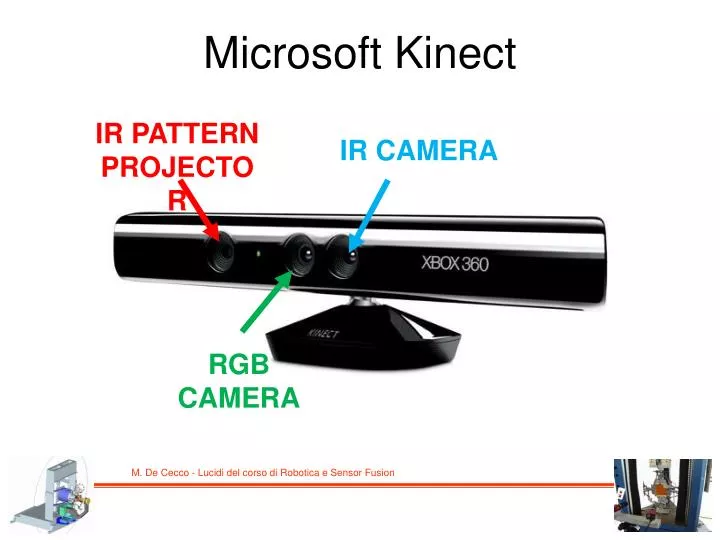
Microsoft Kinect. IR PATTERN PROJECTOR. IR CAMERA. RGB CAMERA. Microsoft Kinect : How it works ?. Microsoft Kinect. Microsoft Kinect. Microsoft Kinect. Microsoft Kinect : Data. points3D_Irsys.m : 3xN matrix of 3D points measured and associated RGB color

E N D
Microsoft Kinect IR PATTERN PROJECTOR IR CAMERA RGB CAMERA
Microsoft Kinect: Data • points3D_Irsys.m: 3xN matrixof 3D pointsmeasured and associated RGB color • calibData.m: intrinsic and extrinsicparametersof IR and RGB camera • imRGB.m: imagecapturedby RGB camera
Microsoft Kinect: Data • points3D_IRsys: 3xN matrixof 3D pointsexpressed in IR camera reference system Numberofpoints N shouldbe 640x480 = 307200!
Microsoft Kinect: Calibration Data calibData.m: intrinsic and extrinsicparametersof IR and RGB camera • K_rgb : 3x3 : intrinsicparametersmatrixof RGB camera • kc_rgb : 1x5 distortionparamteresof RGB camera • K_ir : 3x3 : intrinsicparametersmatrixof IR camera • kc_ir : 1x5 distortionparametersof IR camera • rotRGB2IR : 3x3 rotation matrixfrom RGB to IR reference system • trasRGB2IR : 1x3translation vectorof IR reference system respectto RGB
Reminder z • Il modello geometrico (ideale) della telecamera impiega il modello pinhole (stenoscopio), per cui entrano in gioco i seguenti parametri: • il centro della prospettiva (Oc): corrisponde al secondo punto nodale del sistema ottico; • il piano immagine (p): il piano coincidente con lo schermo sul quale si forma l’immagine; • l’asse principale: la retta coincidente con l’asse ottico (zc); • il punto principale (OP), intersezione dell’asse ottico con il piano immagine; • la distanza focale della telecamera (f): misura la distanza tra il centro della prospettiva ed il punto principale SCCD NOTA: nel sistema CCD la colonna corrisponde alla x, la riga alla y x OCCD y OP x p z f SC y OC
Reference System: From Camera to CCD K_rgb : intrinsicparametersmatrixof RGB camera K_ir : intrinsicparametersmatrixof IR camera z SCCD x OCCD p y0 y OP x0 x P 1 z SRGB fx , fy: focallength (in pixel) of the camera x0, y0: coordinate ofprincipalpoint y OC
Reference System: From Camera to CCD Homogeneous coordinate: z SCCD x OCCD p y0 y OP x0 x Pccd Expressed in pixel 1 z SRGB y OC NOTE: the x coordinate in CCD reference system is the column and the y is the row Alredycompensated in the imagegivenbyKinect
Refernece System: From IR to RGB z x y OP p R T
Microsoft Kinect: RGBimage Distorsionalredycompensated
Thingsto do: • Goal: find in 3d space the blue (or red) cube(dimension 10x10x10 cm ) Steps: • Associate 3D points in IR syswith RGB info • Identifygroundplane and eliminate it (Ransac) • Found the position oftwocubes (SQ and Ransac) • Chose the blue (or red) cube