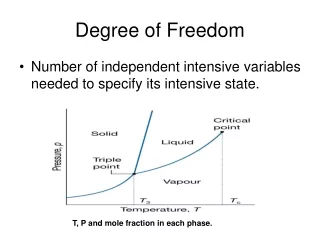
Download
1 / 22
220 likes | 359 Views
Measuring the Allocation of Control in a 6 Degree-of-Freedom Docking Experiment. Introducing the M -metric. Maurice R. Masliah and Paul Milgram Ergonomics in Teleoperation and Control (ETC) Lab Department of Mechanical and Industrial Engineering

E N D
Measuring the Allocation of Controlin a 6 Degree-of-Freedom Docking Experiment Introducing the M-metric Maurice R. Masliah and Paul Milgram Ergonomics in Teleoperation and Control (ETC) Lab Department of Mechanical and Industrial Engineering University of Toronto, Ontario, Canada, M5S 3G8 http://etclab.rose.utoronto.ca {moman, milgram}@etclab.mie.utoronto.ca
Motivation (Images courtesy of Shumin Zhai and Ravin Balakrishnan)
Overview • Measures/definitions of performance metrics • The M-metric • Hypothesis for 6 DOF docking tasks • 6 DOF docking experiment • Results using the M-metric and discussion • Shortcomings / Future Work of the M-metric
Measures/Definitions of Coordination • time-on-target (“not very suitable” [Poulton ‘74]) • accuracy speed [Behbehani et al. ‘88] • spatial or temporal invariance [Morrison & Newell ‘98] • cross-correlations [Vereijken et al. ‘92, Zhai et al. ‘96] • integrality [Jacob et al. ‘94] • inefficiency [Zhai & Milgram ‘98]
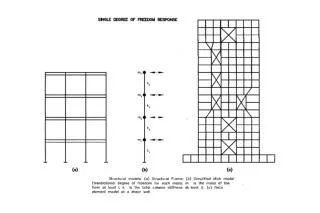
Integrality vs. Inefficiency • Integrality is a measure of simultaneity (in the time domain) • Inefficiency is a measure of distance traversed (in the space domain) B A
The M-metric • Measures the allocation of control across DOFs • “Control” = any movement which reduces error • “Error” = the difference between the goal position and the current position • M-metric = (control simultaneity) × (control efficiency)
Area under DOF curve = 1 Normalized Error Reduction Area of overlap, intersection between the DOFs. Definition of Control Simultaneity CHANGE IN ERROR
Control Efficiency Efficiency =the weighted average of the ratios of the length of the “optimal” trajectory for each DOF divided by the actual trajectory
M-metric: Primary Features • measures the allocation of control • = simultaneity efficiency • values between 0 and 1 • computed for any number of DOFs ( 2) • (also subsets of the total available DOFs) • computed across DOFs encompassing different measurement units (cm, degrees)
Hypothesis for 6 DOF docking tasks • Non-equal allocation of control across DOFs • Novices • will allocate their control between translation and rotation DOFs • will switch control back and forth • As expertise develops: • will continue to allocate their control between translation and rotation DOFs with improved control • will develop uniform allocation of control across all 6 DOFs
Experimental Design 8 subjects total (between subjects design) 2 input devices : 216 docking trials per session 5 one hour sessions Spaceball Finger-ball = 8640 total trials
within translation within rotation between translation & rotation Results: M-metric Scores 2-way Comparisons
within translation within rotation between translation & rotation Results: M-metric Scores 3-way Comparisons
within rotation between translation & rotation Results: M-metric Scores Over Time
M-metric Summary • new metric for measuring allocation of control • tested in a longitudinal 6 DOF docking task • subjects allocated allocated unequally control across all 6 dofs • subjects controlled rotation & translation separately • separation of control for the isometric device greater than for the isotonic device
Shortcomings / Future Work • Need to define the “correct” path unequivocally • In docking, any trajectory which accomplishes the docking goal is acceptable. • Expand M-metric definition to include tracking, tracing, and target acquisition tasks. • Next experiment : test M-metric on a dynamic 6 DOF tracking task
Conclusion:In a multi-degree of freedom continuous movement task: • the M-metric provides a measure of how control is allocated across available DOFs • it is possible to have two movements with equal performance scores, but with very different time-space trajectories
Acknowledgements • Institute of Robotics and Intelligent Systems (IRIS) • Natural Sciences and Engineering Research Council (NSERC) • Shumin Zhai, IBM Almaden Research • Ravin Balakrishnan, University of Toronto
Taxonomy of Manual Control Tasks [Masliah ‘99]