Download
1 / 29
1.43k likes | 3.74k Views
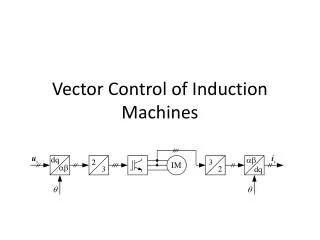
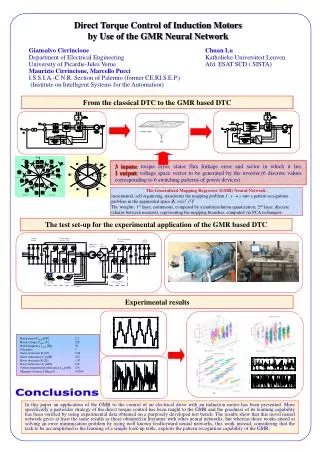
Direct Torque Control of Induction Machine. Dr. Nik Rumzi Nik Idris Department of Energy Conversion, Faculty of Electrical Engineering, Universiti Teknologi Malaysia. Basic Principles of DTC. High performance induction motor drives. Field Oriented Control - FOC.

E N D
Direct Torque Control of Induction Machine Dr. Nik Rumzi Nik Idris Department of Energy Conversion, Faculty of Electrical Engineering, Universiti Teknologi Malaysia
Basic Principles of DTC • High performance induction motor drives • Field Oriented Control - FOC • Direct Torque Control - DTC
Tref Sa + Voltage Source Inverter Voltage vector selector Sb _ IM T Sc ref + _ + Vdc - Stator flux and torque estimator Basic Principles of DTC • Stator flux and torque control within hysteresis bands • Voltage vector selected based on stator flux and torque demands
Basic Principles of DTC How the voltage vectors control the flux? How the voltage vectors control the torque? These questions will be answered in the following slides
Basic Principles of DTC • Space vector equations of IM :
Basic Principles of DTC • Space vector equations of IM :
Basic Principles of DTC Direct Flux Control • From stator voltage equation : • Neglecting drop across Rs :
Basic Principles of DTC Direct Flux Control • Voltage vectors for 3-phase VSI
010 110 011 100 Dy 001 101 s Hysteresis Flux band y s Basic Principles of DTC Direct Flux Control
Basic Principles of DTC Direct Flux Control q Sector IV Sector III 60o I d Sector II Sector V Sector I Sector VI
vs,4 Sector II vs,3 vs,4 Sector I vs,3 vs,2 Hysteresis band vs,3 vs,4 vs,3 vs,5 vs,2 vs,16 vs,6 Basic Principles of DTC Direct Flux Control If the flux in kth sector k +1 vector increases k + 2 vector reduces • Voltage vector vs,2 and vs,3 in sector I • Voltage vector vs,3 and vs,4 in sector II
ref + /2 ref Flux ref - /2 t Flux error status Flux error /2 ref 1 + Flux error 0 t - /2 _ 0 0 Flux Error Status 1 0 t Basic Principles of DTC Direct Flux Control
Basic Principles of DTC Direct Torque Control • IM torque equation
Basic Principles of DTC Direct Torque Control • It can be shown that • Rotor flux follows the stator flux with a time constant r
Basic Principles of DTC Direct Torque Control t = t1 t = t1 + t q q Applying voltage vectors rotating in the same direction s s Rotate continuously Rotate continuously sr sr d r r d q t = t1 + t Applying voltage vectors in opposite direction or zero voltage vectors Rotate continuously s sr r d
Basic Principles of DTC Direct Torque Control • Three cases are considered : • Case 1 • Forward active voltage vectors • stator flux increases or decreases • Increases sr • Increases Torque
Basic Principles of DTC Direct Torque Control Case 2 Zero voltage vectors • stator flux stops • Decreases sr • Decreases Torque
Basic Principles of DTC Direct Torque Control Case 3 Reverse active voltage vectors • stator flux increases or decreases • Decreases sr rapidly • Decreases Torque rapidly
1 + Tref 0 -1 _ T T Basic Principles of DTC Direct Torque Control Torque reference Torque T/2 T/2 Torque error T Speed Torque error status 1 0 -1
Basic Principles of DTC • By limiting the torque and flux within their hysteresis bands, de-coupling of torque and flux can be achieved
Tref Sa + Voltage Source Inverter Voltage vector selector Sb _ IM T Sc ref + _ + Vdc - Stator flux and torque estimator Basic Principles of DTC • Stator flux and torque control within hysteresis bands • Voltage vector selected based on stator flux and torque demands
Basic Principles of DTC Selection table for optimum switching pattern
Stator Flux and Torque Estimation • Accurate estimation to ensure proper operation and stability • Various methods proposed • voltage model • current model • closed-loop observer
Stator Flux and Torque Estimation • Stator flux- voltage model • Problems: • dc drift • stator resistance variation
Stator Flux and Torque Estimation • Torque estimation • In d-q form
Implementation of DTC • Basic I/O requirements: • Phase Current measurement • DC Link Voltage measurement • Speed measurement from Incremental Encoder for closed-loop speed control (optional) • Fast processor to reduce torque ripple
Speed Current Torque d-flux Experimental Results • From oscilloscope • 55s sampling, 240V, ¼ HP IM Step speed reference
Speed Current Torque Experimental Results • From oscilloscope • 55s sampling, 240V, ¼ HP IM Square wave speed reference