Download
1 / 25
250 likes | 674 Views
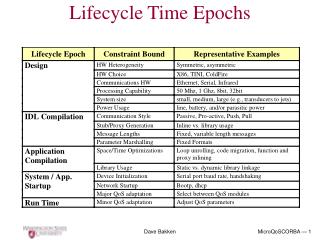
Epochs in Endourology Percutaneous Renal Surgery. JOURNAL OF ENDOUROLOGY Volume 20, Number 3, March 2006 2000级七年制 李涛. 经皮肾脏外科学. 1.Introduction 2.PCNL ( 经皮 肾取石术 ) 3.PERCUTANEOUS PYELOLYSIS ( 经皮肾盂成形术 )

E N D
Epochs in EndourologyPercutaneous Renal Surgery JOURNAL OF ENDOUROLOGYVolume 20, Number 3, March 2006 2000级七年制 李涛
经皮肾脏外科学 • 1.Introduction • 2.PCNL (经皮肾取石术 ) • 3.PERCUTANEOUS PYELOLYSIS(经皮肾盂成形术) • 4.LAPAROSCOPIC/RETROPERITONEOSCOPIC URETEROLITHOTOMY(腹腔镜/腹膜后腹腔镜输尿管切开取石术 ) • 5.ROBOTIC PERCUTANEOUS NEPHROLITHOTOMY(机器人经皮肾切开取石术) • 6.Conclusions
简介 • 上世纪八十年代 泌尿微创理论出现 • John E.A. Wickham • The new surgery • 《BritishMedicalJournal》 1987 • The history of surgery :three phases • 同时在这一时期出现了很多方面的尝试,包括: 经皮肾外科 腹膜后内镜学 泌尿机器人技术
经皮肾取石术(PCNL) 适合肾结石取出的技术,随着 影像技术的发展,逐渐改变了 肾结石的治疗方法. 我们应用的PCNL是在 Wickham和他同时代的人 设计的基础上改进而来的.
1976年 PCNL出现 • 1979年 Wickham和Kellrt(放射学家)行PCNL at the Institute of Urology, London • 1979年 Wickham报道了早期的研究结果 at the first meeting of the Endourological Society • 早期PCNL特点: 分两个阶段进行 耗时长 需要几天 只适合位于肾盂的活动结石 1) 肾盂引流管的置换3F→ 22F-26F局麻 2) 结石的取出30°21F硬质膀胱镜 全麻
1984年 Wickham发表了对100例患者行PCNL的报道 • 此时PCNL特点:一个阶段就可以完成 需一两个小时 使用安氏套管和肾镜 • PCNL优于开放性手术 Amplatz sheath and nephroscope • 目前PCNL: 成功率高 安全 花费低 可用于肾盏和肾盂结石 而且可以和SWL(震波碎石术)̖ 输尿管镜结合 • 有德国专家经过试验提出没有必要对肾结石作开放性的手术
钬激光碎石 气压弹道碎石 镜下夹取碎石
经皮肾盂成形术 80年代的早期经皮肾外科已经在治疗肾结石中占了 很大比重,于是人们开始考虑PUJO的经皮治疗.那时PUJO的治疗完全靠开放手术 . • 最早在1983年就有人用这种技术为三例患者手术, 两例取得了成功. • 1984年 28人手术,18人手术成功 • 和PCNL一样:需要两个阶段 需要几天的时间 • 首先建立经皮到肾的路径, • 72小时后再行肾盂成形术.
经过多年的发展,它的名称也发生了变化,在 美国被称为内镜肾盂成形术(endopyelotomy). • 目前腹腔镜肾盂成型术出现并成为治疗PUJO的 金标准 .
腹腔镜/腹膜后腹腔镜输尿管切开取石术 70年代末 Ron Miller(Wickham 大学讲师) 开始研究后腹膜肾脏腹腔镜的可能性? 早期的腹膜后腹腔镜视野是直的,且缺乏气体方面的技术. Wickham首先报道使用空气填充和腹腔镜进行腹膜后腹腔镜手术. 1979年 Wickham 腹膜后输尿管结石切除术.
John Wickham performing laparoscopic ureterolithotomy in 1979
八十年代初期 Wchham 试图经腹膜后行腹腔镜 尸体肾切除术,因未能获得满意的腹膜后腔隙,视 野不清而告失败 • 腹膜后间隙为一潜在的腔, 建立一个具有真正 空间的“腹膜后腔”是手术成功的关键.
1992年 印度医生Gaur 创新的气囊技术 分离腹膜后组织,充开后腹膜空间, 灌注CO2 气体,采用后腹膜间隙进路进行腹腔镜手术, 从此这种方法获得了革命进展.
机器人经皮肾切开取石术 1980年 Wickham伦敦帝国大学机械工程小组的研究 1)TURP(transurethral prostatic resection)机器人框架 参与Guy’s Hospital试验 2)PAKY (percutaneous access to the kidney)机器人 机械手 5-DOF(自由度) 被动运动 机械手前端有穿刺针,可通过C型臂定位. 早期的试验显示它的定位准确度大约是1.5mm • Kavoussi和他的同事证实了遥控操作PAKY的可能性, 主动穿刺的机器人,进行PCNL手术.
2002年 跟踪器(tracker)的出现淘汰了上面的设计, 因为它可以提供6个自由度的数据, 而且还可以和X线、CT合用,定位更准确.
2003年 首次跨大西洋的远程机器人随机对照试验 • Guy’s and Johns Hopkins hospitals • 内容:远程控制机器人将针刺入模型肾中 • 问题:Can a robot accurately and successfully place a needle into the collecting system of a kidney controlled from a distant site? • 样本:150 needles inserted by robot (120 local, 30 from USA). Control group 150 needles inserted by humans. • 结果:机器手虽然比人手多少慢些,但操作极准确. 而准确在PCNL手术中是至关紧要的
总结 泌尿外科见证了微创外科手术的巨大进步,其中一些在Wickham时代就出现了,但也是在那时,经皮外科学、腹腔镜泌尿科学、机器人技术开始出现并传播开来.